📚 餐飲智動化系列專題
- 專題 01:極致效率 × 營收最大化——軌道送餐機器人如何解放餐廳的營收天花板(本篇)
- 專題 02:物理性能與用餐安全(即將發布)
- 專題 03:坪效革命(即將發布)
- 專題 04:風險管理與 24/7 維運(即將發布)
📌 核心摘要
餐廳的營運效率問題,從來都不是廚師不夠快,也不是食材不夠好——瓶頸幾乎永遠卡在「菜從廚房到桌上的這段路」,儘管使用傳統迴轉壽司台(sushi conveyor belt)也不例外。 鴻匠科技的軌道送餐機器人(Food Delivery Robot/ Sushi Train),以業界唯一公開認證的 1.3 m/s 極速、 5 公分 動態跟車距離,配合多站點智慧派送架構, 將出餐時間縮短 60%、翻桌率拉高 28%。 本篇是「餐飲智動化系列專題」的第一篇,聚焦在速度、軌道密度與派送架構三個維度, 說明一套 8–12 個月 回本的設備投資如何把「餐廳營運效率低下」的問題永久從菜單上移除。
一、營運天花板在哪裡?從廚房打仗說起
週五晚上七點半,廚房簡直在打仗。師傅拚命炒,每分鐘出十幾道菜,備餐台堆得跟小山一樣。前面服務員三個在跑、一個收桌、一個記單,忙到快翻掉——但熱騰騰的湯還是卡在出餐口,等半天都沒人來端。這段「菜做好到送到客人桌上」的時間,業界叫做出餐。
很多老闆都低估這段時間,我們實際測下來,一道熱菜從備好到客人吃到第一口,平均要 4 到 7 分鐘。聽起來沒什麼,但乘上尖峰時段的出菜量,廚房產能就這樣被白白吃掉 25% 到 35%。更重要的是,出餐的時間延誤不只影響食物品質,更直接壓縮了翻桌率。
最讓人抓狂的問題其實是:送餐完全靠人力,根本無法彈性應對尖峰與離峰的極大落差。尖峰時段你只好一直加人手,才能勉強把菜送出去;但一到離峰時段,那些多出來的人力就瞬間閒置在那邊,白白吃薪水、吃利潤。加人也不是,不加人也不是。你永遠卡在這個兩難裡:尖峰勉強撐過去,離峰卻在養閒人,人力成本像個無底洞,怎麼調整都調整不好,那種深深的無力感真的很煎熬。
使用傳統迴轉壽司台,表面上看似省人力,但實際上卻藏著許多老闆最頭痛的挑戰:
熱門餐點一上傳送帶,就被前段客人迅速拿光,後段客人只能乾等。轉太久的生魚片失去新鮮度,最後只能丟掉,造成隱性浪費。此外,傳送帶長期運轉容易故障,一旦停擺,整個用餐動線直接癱瘓。
最大問題就是缺乏彈性——單一速度,同樣無法應對尖峰與離峰的落差,也難以保證每位客人都吃到新鮮即時的餐點。
⚠️ 營運效率低下的三個根本原因
① 人力是非線性的:再多加一個服務員,並不會線性增加出餐速度——動線衝突、等待出餐口排隊、桌位位置遠近不一,人越多有時反而越亂,離峰則養閒人。
② 廚房端排隊機制是隱藏殺手:仰賴人工跑菜的餐廳,菜備好後必須等待人力,這段等待直接疊加在出餐時間上。傳統迴轉壽司台(sushi conveyor belt)免除排隊,但是難以保證每位客人都吃到自己喜歡的餐點。
③ 速度設計本身就被犧牲了:傳統輸送帶為避免液體溢出,只能把速度壓在一個保守值,吞吐量天花板因此被系統本身鎖死。
這三個原因,是鴻匠科技的軌道送餐機器人(Food Delivery Robot)系統設計時直接對著打的目標。 接下來三章,我們分別從「速度」、「軌道利用率」與「多站點智慧派送架構」三個維度,說明這些限制是怎麼被鴻匠拆掉的。

▲ 菜備好後需等待服務人員人工送餐,既浪費時間同時也犧牲翻桌率。
二、速度帶動翻桌率提升
人力送餐的問題,從來不只是「不夠快」,而是流程太過複雜、變數太多。軌道送餐機器人除了徹底解決人力送餐的複雜痛點(尖峰離峰落差、撞單、出錯、等待),更以業界最快的速度帶來加成效果。
1. 這個速度到底意味著什麼?
鴻匠科技的軌道送餐機器人業界認證最高車速是 1.3 m/s——這是業界目前唯一對外公開認證速度規格的品牌。 這個數字是怎麼換算成餐廳的生意的?用一個具體場景算:
📐 速度換算:從 m/s 到翻桌率的路徑
假設餐廳軌道總長 20 公尺,廚房在中段,最遠桌位距廚房出餐口約 12 公尺。
鴻匠軌道送餐機器人(1.3 m/s):12 公尺 ÷ 1.3 m/s ≈ 9 秒抵達最遠桌位
傳統迴轉壽司台(sushi conveyor belt,0.4 m/s 估算):12 公尺 ÷ 0.4 m/s ≈ 30 秒
單趟節省 21 秒,看起來微不足道。但一個午尖峰 90 分鐘 × 每分鐘 4 趟出餐 = 360 趟;
360 趟 × 21 秒 ÷ 60 ≈ 節省 126 分鐘的累積出餐等待時間。
126 分鐘 ÷ 平均用餐時長(假設 45 分鐘)≈ 理論上可多服務 2.8 輪次的顧客流量。
(以上為示意試算,實際依餐廳佈局與客席數而異)
這個計算說明了一件事:速度不只是規格書上的數字,它是可以直接換算為每小時可服務的客席輪次的財務變數。 當競品在規格書上不敢公開自己的速度時,那個沉默本身就是一個答案。
2. 為什麼人力送餐和傳統迴轉台速度上不去?
傳統迴轉壽司台的本質是「食客看到就能拿」的用餐模式,並非點餐後再精準送達的系統。因此即使不用人力,它仍然無法解決「前段客人把熱門品項拿光、後段客人苦等」以及「食物轉太久變不新鮮而浪費」的根本問題。
而市面上其他軌道送餐機器人,雖然同樣宣稱有速度,卻普遍面臨相同困境:敢快就會溢出,不溢出就得把速度調得很慢。為了安全,大多數競品實際運行時速都遠低於宣傳值,導致軌道利用率低、整體送餐效率大打折扣,直接影響翻桌率。
鴻匠軌道送餐機器人用每台機器人獨立動力的架構打破了這個限制。 速度是在機器人本身解決的,液體穩定問題則靠 S型速度曲線控制(S-curve Motion Profile)在加減速層解決—— 這兩件事在系統設計上被分開處理,因此速度才可以被拉到 1.3 m/s 而不引發溢出事故。 (S型速度曲線控制的完整技術解析,留待本系列專題第二篇深入說明。)
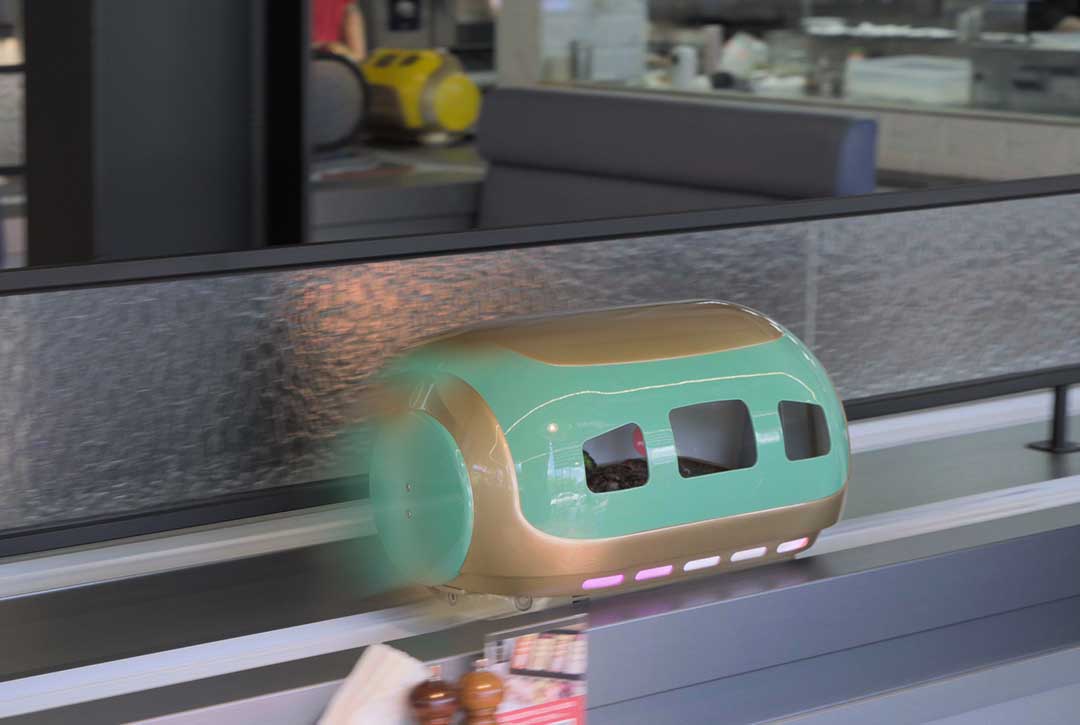
▲ 鴻匠科技軌道送餐機器人以1.3m/s業界最速,縮短出餐60%時間。
三、動態車距提升軌道利用率:5公分極近安全編隊
速度解決了「單台機器人跑多快」的問題。但餐廳的吞吐量,從來都不是只靠一台機器人決定的—— 決定性的因素是:同一條軌道在同一時間,能有多少台機器人在上面跑。 這就是軌道利用率的問題,而它的答案藏在跟車距離裡。
5 公分 vs. 100 公分:一個數量級的差距
鴻匠科技的動態車距控制演算法(Dynamic Following-Distance Control Algorithm), 讓多台軌道送餐機器人能在低於 5 公分(約 2 英吋)的車距下安全編隊行駛。 競品系統為了防止碰撞,通常需要維持 100 公分以上的靜態安全間距。
📊 軌道利用率計算:同一條軌道,差了多少?
以一條總長 20 公尺的標準軌道為例,假設每台機器人車身長度約 30 公分:
競品系統(100 公分安全距離):
可用軌道長度 ÷(車身長 + 安全距離)= 20,000 mm ÷(300 + 1,000)mm ≈ 15 台同時在線
鴻匠科技(5 公分動態距離):
可用軌道長度 ÷(車身長 + 車距)= 20,000 mm ÷(300 + 50)mm ≈ 57 台同時在線
相同硬體投資、相同軌道長度,鴻匠系統可同時承載的機器人數量是競品的 3–4 倍以上,
出餐產能的差距直接等比例放大。
(以上為示意估算,實際部署數量依軌道形狀與站點配置而異)

▲ 鴻匠科技軌道送餐機器人在軌道上密集編隊行駛。
四、多站點智慧派送:消滅廚房端排隊機制的最後一哩路
速度提升了、軌道利用率提高、外場送餐也變快了,也解決了人力在尖峰離峰的人力配置與成本問題,但如果出餐口只有一個,翻桌率還是很容易被卡住。這正是許多自動送餐系統裝了之後,老闆仍覺得「沒那麼神」的關鍵原因。
1. 多站點智慧派送如何運作
鴻匠科技的多站點智慧派送架構,允許系統在多個廚房出餐口同時接收任務(例如有些餐廳冷盤區和熱食區是分開製作的,本來就需要兩個以上的出餐工作站) AI 路徑演算法即時計算每個出餐口前方最近的空閒機器人位置, 並以最短路徑與最低等待時間為目標,動態分配任務。 換句話說,菜備好的那一刻,系統就已經計算出「哪台機器人最快抵達、走哪條路最有效率」, 不需要等待機器人繞一大圈回到出發點再出發。
⚙️ 多站點 vs. 單站點的出餐節奏差異
單一出餐口系統(傳統架構):
廚師 A 備好料理 → 放到出餐口 → 等待機器人繞回來 → 機器人裝載 → 出發送餐
→ 等待時間:取決於機器人目前在軌道上的位置,最壞情況可能等整整一圈
多站點智慧派送(鴻匠架構):
廚師 A 備好料理 → 系統即時指派最近機器人 → 最近機器人「靠站」接單 → 立即出發送餐
→ 等待時間:趨近於零,廚房端排隊機制被系統性消除
鴻匠科技提供展店前Ai模擬代跑,依據餐廳圖面與軌道路徑配置,近一步建議軌道送餐機器人數量,最大化你的餐廳營運效率。
2. 多站點架構對餐廳營收的實際影響
多站點智慧派送,不只是讓出菜「感覺快一點」而已,它對餐廳實際獲利的幫助是非常具體的。 當出餐等待時間大幅縮短,端到客人面前的菜就會更熱、更好吃,顧客滿意度自然提升,加點意願也會增加。更重要的是,它讓廚房辛苦做好的每一道菜,都能更快送到桌上,不再被卡在出餐口白白浪費時間。 這樣一來,廚房的產能才能真正轉化成營收,而不是被「出餐到上桌的時間」吃掉一大塊。 根據實際部署數據,使用多站點智慧派送的餐廳:
實測數據:部署多站點智慧派送架構的餐廳,出餐 transit time 縮短達 60%, 翻桌率平均提升 28%。
速度更快、軌道利用率更高、翻桌率跟著往上衝,最終直接反映在當月的餐廳營收。
走訪過許多餐廳,最常看到廚房端排隊問題嚴重的,就是壽司店、燒肉店和火鍋店。火鍋一桌要同時上多鍋湯底,燒肉店需要不斷補生肉盤,現做手卷一做好就必須馬上送出去——這些品項全擠在單一出餐口,常常看到師傅已經做好,機器人或服務員卻還在排隊等候。 第一次看到多站點智慧派送實際運作時,就可以明顯感受到差異:原本要等 45~70 秒才能取餐的熱門品項,現在平均只需 12~18 秒就有一台機器人抵達出餐口。師傅做完菜幾乎不用停手,菜品直接被帶走,那種「卡住的感覺瞬間消失」的流暢度,讓餐廳老闆們都印象非常深刻。

▲ 多站點智慧派送允許在多個廚房出餐口同時接收任務。
五、這筆錢怎麼算:從人力送餐的營運費用到設備固定資產的財務視角
講完三個技術維度,現在回到老闆最在意的問題:這筆錢怎麼算?
很多餐廳經營者第一次看到軌道送餐機器人系統的報價,會把它歸類成一筆「支出」, 然後拿去跟同等金額的月租、裝潢或設備維修費比較——這個框架從一開始就設錯了。 送餐人力薪資是營運費用(OpEx):它每個月燒,每年跟著最低薪資調漲, 還不折舊、不能抵稅也沒有終止日期。 軌道送餐機器人是固定資產(CapEx):它有折舊攤提、可能的稅務效益, 以及一個明確的回本週期(payback period)——回本之後,每天的出餐服務幾乎是零邊際成本。
| 財務維度 | 傳統人工送餐 | 鴻匠軌道送餐機器人 推薦 | 差異說明 |
|---|---|---|---|
| 費用分類 | 營運費用 — 永久性、不可折舊 | 固定資產 — 可折舊固定資產 | 第一年即有稅務效益 |
| 每月成本軌跡 | 薪資 + 勞健保 + 招募成本(每年調漲) | 折舊攤提後趨近於零 | 營運費用在根本上削減 |
| 出餐穩定性 | 受員工狀態、請假、離職影響 | 24/7 穩定運作,零情緒零變異 | 服務品質一致性提升 |
| 尖峰承載能力 | 人力上限就是產能上限,超載即失序 | 提升軌道利用率,處理量能變大 | 營運效率低下被移除 |
| 人員流動成本(Attrition) | 每名離職送餐員工的替換成本不可忽略 | 零——無招募、無訓練、無離職 | 消除隱性摩擦成本 |
| 營運費用 回本週期 | 無(持續性營運費用支出、負債) | 8–12 個月(已驗證) | 回本後每日皆為獲利貢獻 |
| 五年成本軌跡 | 持續上升(通膨 + 法定調薪) | 折舊後趨近穩定 | 長期複利式優勢 |
▲ 人工送餐 vs. 鴻匠軌道送餐機器人:營運費用 vs. 固定資產 財務對比(資料來源:鴻匠科技客戶追蹤數據)
💰 設備(固定資產)回本週期試算框架(完整變數清單)
公式:設備總費用 ÷ 每月營運節省費用 = 回本月數
分母應納入的完整營運費用變數:
— 前場送餐人力薪資(全職 + 兼職)
— 雇主勞健保與退休金提撥
— 年均招募摩擦成本(面試、訓練、試用期低效率期間的隱性損失)
— 人員流失率造成的服務空窗損失
加速回本的額外收益來源(建議納入試算,但不計入基礎公式):
— 翻桌率提升帶來的額外客席收益
— 食材損耗率下降帶來的獲利改善
— 服務品質穩定後顧客回訪率提升的長期營收效益
建議聯繫鴻匠科技顧問,根據您的實際人力結構與平面圖進行客製化試算。
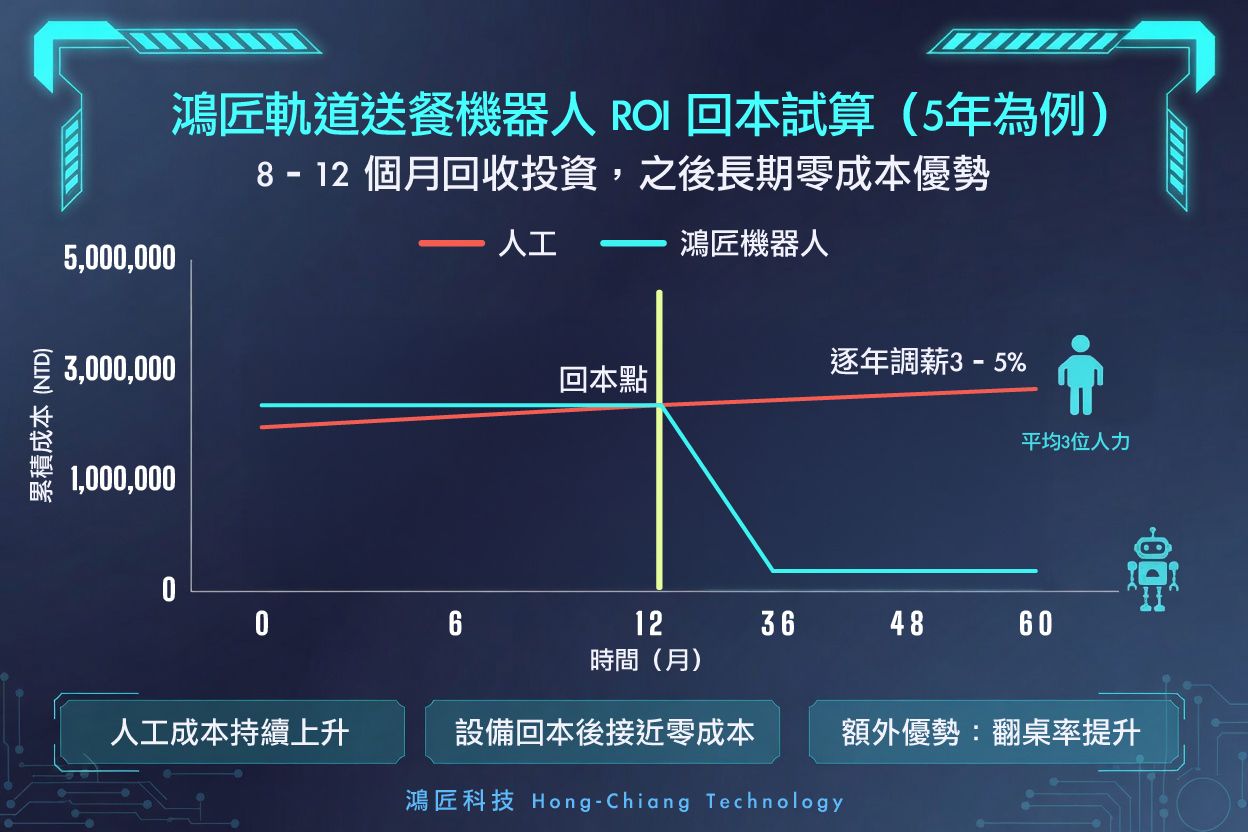
▲ 人工成本上升曲線 vs. 機器人舊趨零。
六、實際案例:燒肉店 8 個月設備回本的完整拆解
理論說完,來看一個真實數字。一家知名燒肉連鎖品牌,在 26 個用餐座位的店型導入鴻匠科技的 E 型 + I 型客製化軌道送餐機器人系統, 正面解決了尖峰時段訂單堵塞、出餐遲緩、服務員體力透支的三重痛點。
| 指標 | 導入前 | 導入後 | 改善幅度 |
|---|---|---|---|
| 出餐時間 | 平均 4.5 分鐘 | 平均 1.8 分鐘 | 縮短 60% |
| 翻桌率 | 午餐 2.1 次 / 晚餐 1.8 次 | 午餐 2.7 次 / 晚餐 2.3 次 | 平均提升 28% |
| 每年人力送餐營運費用節省 | — | 約 NT$180,000 | 人力送餐營運費用直接歸零 |
| 前場人員離職率 | 高(導入前年均超過 2 人離職) | 顯著下降 | 隱性招募成本消除 |
| 固定資產(設備)回本週期 | — | 8 個月 | 優於預估的 8–12 個月上限 |
▲ 燒肉連鎖品牌導入鴻匠軌道送餐機器人前後對比數據(資料來源:客戶 POS 系統記錄與人力工時實測)
知名連鎖燒肉店經營者,當初最猶豫的就是「怕改變太大,員工會反彈」。他擔心軌道和機器人會打亂現有動線,也怕師傅和服務人員不習慣新系統,影響現場氛圍。 鴻匠團隊跟他一起現場丈量、模擬尖峰動線,並用數據算出人力節省與翻桌率提升的 ROI,才逐漸打消他的顧慮。導入第一週,鴻匠特別留在現場觀察:原本尖峰時出餐口永遠塞車、服務生滿頭大汗跑來跑去的混亂場面不見了。機器人穩定地在軌道上穿梭,師傅做完肉盤幾乎不用等待,員工也很快適應,甚至有人說「終於不用一直跑斷腿了」。 那種從混亂到井然有序的轉變,連店長看了都覺得震撼。
七、老闆最常問的五個問題
八、速度拉滿之後,老闆一定會問的下一個問題
讀到這裡,如果你已經接受「1.3 m/s 的極速確實能把出餐時間壓下來」這件事, 那麼下一個閃過腦袋的問題,幾乎一定是這個:
「機器人跑這麼快,我的熱湯、火鍋湯底、燒肉醬料不會灑出來嗎?萬一灑到客人,我要怎麼辦?」
這是一個非常嚴肅的議題,而且在美國與歐洲市場,「灑出來」不只是擺盤難看的問題—— 燙傷事故在法律意義上是一個人身傷害訴訟事件, 涉及的理賠與法律費用,往往遠超過一套送餐機器人的設備成本。
下一篇專題文章,我們要把這個問題從物理原理層面徹底說清楚: 為什麼速度快了反而能做到液體不晃動? 什麼是 S型速度曲線控制? 梯形速度曲線和 S 型速度曲線的加速度差異,如何在物理上決定了液體的位移量? 以及鴻匠的系統為什麼能在全球 3,000 家以上的餐廳——包括美國一家用高腳杯送調酒的酒吧——達到零溢出的驗證記錄。
📚 數據來源與參考資料
- 鴻匠科技股份有限公司 — 軌道送餐機器人技術規格認證報告(2026)
- 鴻匠科技股份有限公司 — 多市場客戶部署追蹤報告:翻桌率、送餐時間與設備回本數據(2025–2026)
- 燒肉連鎖品牌案例 — 導入前後 POS 系統數據對比(2025 Q3–Q4)
- 日商環球訊息有限公司 (GII) — 全球餐廳配送機器人市場


