专题01:极致效率× 营收最大化——轨道送餐机器人如何解放餐厅的营收天花板
餐厅营收天花板到底卡在哪?不是厨师不够快,而是「菜从厨房到桌上的这段路」,增加送餐人力只是治标不治本、徒增成本。
轨道送餐机器人(Food Delivery Robot)设计上是「接管机械性送餐任务」,而非取代服务人员的整体角色。机器人负责从厨房到餐桌的点对点送达;前场人员因此从重复搬运的体力消耗中解放,转而专注于翻桌整理、点餐引导、加点推荐与顾客体验管理等高附加价值工作。多个烧肉客户案例显示,服务员角色升级后,人员流失率(attrition)也显著下降。
📚 餐饮智动化系列专题
- 专题01:极致效率× 营收最大化——轨道送餐机器人如何解放餐厅的营收天花板(本篇)
- 专题02:物理性能与用餐安全(即将发布)
- 专题03:坪效革命(即将发布)
- 专题04:风险管理与24/7 维运(即将发布)
📌 核心摘要
餐厅的营运效率问题,从来都不是厨师不够快,也不是食材不够好——瓶颈几乎永远卡在「菜从厨房到桌上的这段路」,尽管使用传统回转寿司台(sushi conveyor belt)也不例外。鴻匠科技的轨道送餐机器人(Food Delivery Robot/ Sushi Train),以业界唯一公开认证的1.3 m/s极速、5 公分动态跟车距离,配合多站点智慧派送架构, 将出餐时间缩短60%、翻桌率拉高28%。 本篇是「餐饮智动化系列专题」的第一篇,聚焦在速度、轨道密度与派送架构三个维度, 说明一套8–12 个月回本的设备投资如何把「餐厅营运效率低下」的问题永久从菜单上移除。
目录
- 一、营运天花板在哪里?从厨房打仗说起
- 二、速度带动翻桌率提升
- 三、动态车距提升轨道利用率:5公分极近安全编队
- 四、多站点智慧派送:消灭厨房端排队机制的最后一哩路
- 五、这笔钱怎么算:从人力送餐的营运费用到设备固定资产的财务视角
- 六、实际案例:烧肉店8 个月设备回本的完整拆解
- 七、老板最常问的五个问题
- 八、下一篇预告:速度拉满之后,老板一定会问的下一个问题
一、营运天花板在哪里?从厨房打仗说起
周五晚上七点半,厨房简直在打仗。师傅拼命炒,每分钟出十几道菜,备餐台堆得跟小山一样。前面服务员三个在跑、一个收桌、一个记单,忙到快翻掉——但热腾腾的汤还是卡在出餐口,等半天都没人来端。这段「菜做好到送到客人桌上」的时间,业界叫做出餐。
很多老板都低估这段时间,我们实际测下来,一道热菜从备好到客人吃到第一口,平均要4 到7 分钟。听起来没什么,但乘上尖峰时段的出菜量,厨房产能就这样被白白吃掉25% 到35%。更重要的是,出餐的时间延误不只影响食物品质,更直接压缩了翻桌率。
最让人抓狂的问题其实是:送餐完全靠人力,根本无法弹性应对尖峰与离峰的极大落差。尖峰时段你只好一直加人手,才能勉强把菜送出去;但一到离峰时段,那些多出来的人力就瞬间闲置在那边,白白吃薪水、吃利润。加人也不是,不加人也不是。你永远卡在这个两难里:尖峰勉强撑过去,离峰却在养闲人,人力成本像个无底洞,怎么调整都调整不好,那种深深的无力感真的很煎熬。
使用传统回转寿司台,表面上看似省人力,但实际上却藏着许多老板最头痛的挑战:
热门餐点一上传送带,就被前段客人迅速拿光,后段客人只能干等。转太久的生鱼片失去新鲜度,最后只能丢掉,造成隐性浪费。此外,传送带长期运转容易故障,一旦停摆,整个用餐动线直接瘫痪。
最大问题就是缺乏弹性——单一速度,同样无法应对尖峰与离峰的落差,也难以保证每位客人都吃到新鲜即时的餐点。
⚠️ 营运效率低下的三个根本原因
① 人力是非线性的:再多加一个服务员,并不会线性增加出餐速度——动线冲突、等待出餐口排队、桌位位置远近不一,人越多有时反而越乱,离峰则养闲人。
② 厨房端排队机制是隐藏杀手:仰赖人工跑菜的餐厅,菜备好后必须等待人力,这段等待直接叠加在出餐时间上。传统回转寿司台(sushi conveyor belt)免除排队,但是难以保证每位客人都吃到自己喜欢的餐点。
③ 速度设计本身就被牺牲了:传统输送带为避免液体溢出,只能把速度压在一个保守值,吞吐量天花板因此被系统本身锁死。
这三个原因,是鴻匠科技的轨道送餐机器人(Food Delivery Robot)系统设计时直接对着打的目标。 接下来三章,我们分别从「速度」、「轨道利用率」与「多站点智慧派送架构」三个维度,说明这些限制是怎么被鸿匠拆掉的。

▲ 菜备好后需等待服务人员人工送餐,既浪费时间同时也牺牲翻桌率。
二、速度带动翻桌率提升
人力送餐的问题,从来不只是「不够快」,而是流程太过复杂、变数太多。轨道送餐机器人除了彻底解决人力送餐的复杂痛点(尖峰离峰落差、撞单、出错、等待),更以业界最快的速度带来加成效果。
1. 这个速度到底意味着什么?
鴻匠科技的轨道送餐机器人业界认证最高车速是1.3 m/s ——这是业界目前唯一对外公开认证速度规格的品牌。 这个数字是怎么换算成餐厅的生意的?用一个具体场景算:
📐 速度换算:从m/s 到翻桌率的路径
假设餐厅轨道总长20 公尺,厨房在中段,最远桌位距厨房出餐口约12 公尺。
鸿匠轨道送餐机器人(1.3 m/s): 12 公尺÷ 1.3 m/s ≈ 9 秒抵达最远桌位
传统回转寿司台(sushi conveyor belt,0.4 m/s 估算): 12 公尺÷ 0.4 m/s ≈ 30 秒
单趟节省21 秒,看起来微不足道。但一个午尖峰90 分钟× 每分钟4 趟出餐= 360 趟; 360 趟× 21 秒÷ 60 ≈节省126 分钟的累积出餐等待时间。
126 分钟÷ 平均用餐时长(假设45 分钟)≈ 理论上可多服务2.8 轮次的顾客流量。
(以上为示意试算,实际依餐厅布局与客席数而异)
这个计算说明了一件事:速度不只是规格书上的数字,它是可以直接换算为每小时可服务的客席轮次的财务变数。 当竞品在规格书上不敢公开自己的速度时,那个沉默本身就是一个答案。
2. 为什么人力送餐和传统回转台速度上不去?
传统回转寿司台的本质是「食客看到就能拿」的用餐模式,并非点餐后再精准送达的系统。因此即使不用人力,它仍然无法解决「前段客人把热门品项拿光、后段客人苦等」以及「食物转太久变不新鲜而浪费」的根本问题。
而市面上其他轨道送餐机器人,虽然同样宣称有速度,却普遍面临相同困境:敢快就会溢出,不溢出就得把速度调得很慢。为了安全,大多数竞品实际运行时速都远低于宣传值,导致轨道利用率低、整体送餐效率大打折扣,直接影响翻桌率。
鸿匠轨道送餐机器人用每台机器人独立动力的架构打破了这个限制。 速度是在机器人本身解决的,液体稳定问题则靠S型速度曲线控制(S-curve Motion Profile)在加减速层解决—— 这两件事在系统设计上被分开处理,因此速度才可以被拉到1.3 m/s 而不引发溢出事故。 (S型速度曲线控制的完整技术解析,留待本系列专题第二篇深入说明。)
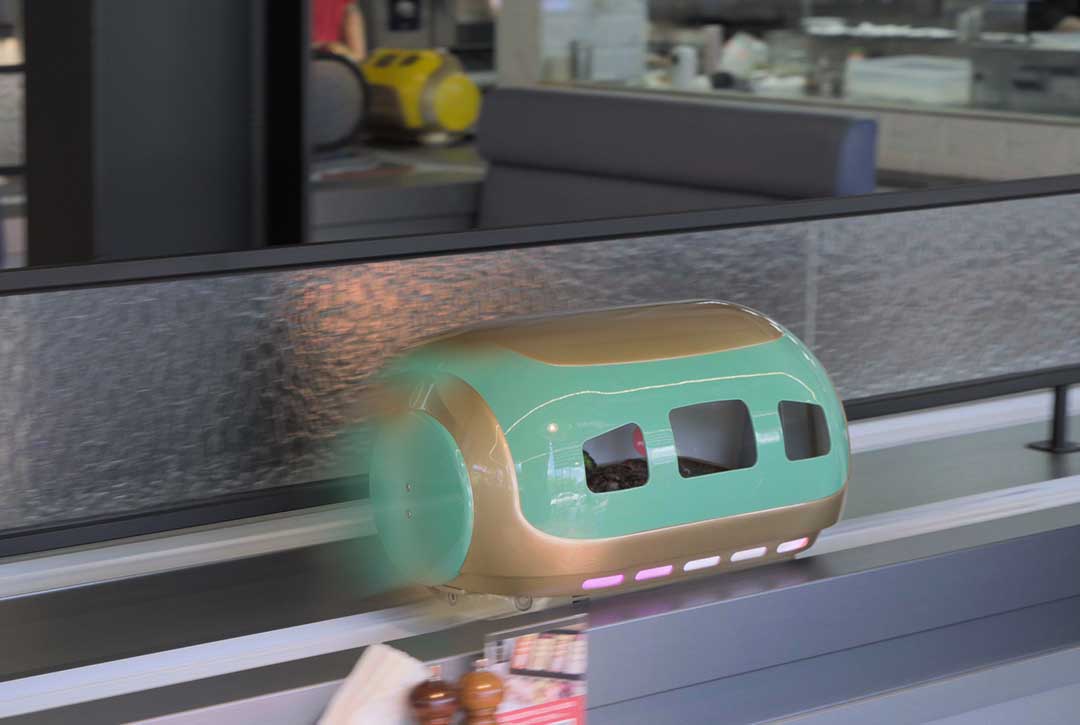
▲鴻匠科技轨道送餐机器人以1.3m/s业界最速,缩短出餐60%时间。
三、动态车距提升轨道利用率:5公分极近安全编队
速度解决了「单台机器人跑多快」的问题。但餐厅的吞吐量,从来都不是只靠一台机器人决定的—— 决定性的因素是:同一条轨道在同一时间,能有多少台机器人在上面跑。 这就是轨道利用率的问题,而它的答案藏在跟车距离里。
5 公分vs. 100 公分:一个数量级的差距
鴻匠科技的动态车距控制演算法(Dynamic Following-Distance Control Algorithm), 让多台轨道送餐机器人能在低于5 公分(约2 英吋)的车距下安全编队行驶。 竞品系统为了防止碰撞,通常需要维持100 公分以上的静态安全间距。
📊 轨道利用率计算:同一条轨道,差了多少?
以一条总长20 公尺的标准轨道为例,假设每台机器人车身长度约30 公分:
竞品系统(100 公分安全距离):
可用轨道长度÷(车身长+ 安全距离)= 20,000 mm ÷(300 + 1,000)mm ≈ 15 台同时在线
鴻匠科技(5 公分动态距离):
可用轨道长度÷(车身长+ 车距)= 20,000 mm ÷(300 + 50)mm ≈ 57 台同时在线
相同硬体投资、相同轨道长度,鸿匠系统可同时承载的机器人数量是竞品的3–4 倍以上, 出餐产能的差距直接等比例放大。
(以上为示意估算,实际部署数量依轨道形状与站点配置而异)

▲鴻匠科技轨道送餐机器人在轨道上密集编队行驶。
四、多站点智慧派送:消灭厨房端排队机制的最后一哩路
速度提升了、轨道利用率提高、外场送餐也变快了,也解决了人力在尖峰离峰的人力配置与成本问题,但如果出餐口只有一个,翻桌率还是很容易被卡住。这正是许多自动送餐系统装了之后,老板仍觉得「没那么神」的关键原因。
1. 多站点智慧派送如何运作
鴻匠科技的多站点智慧派送架构,允许系统在多个厨房出餐口同时接收任务(例如有些餐厅冷盘区和热食区是分开制作的,本来就需要两个以上的出餐工作站) AI 路径演算法即时计算每个出餐口前方最近的空闲机器人位置, 并以最短路径与最低等待时间为目标,动态分配任务。 换句话说,菜备好的那一刻,系统就已经计算出「哪台机器人最快抵达、走哪条路最有效率」, 不需要等待机器人绕一大圈回到出发点再出发。
⚙️ 多站点vs. 单站点的出餐节奏差异
单一出餐口系统(传统架构):
厨师A 备好料理→ 放到出餐口→ 等待机器人绕回来→ 机器人装载→ 出发送餐
→ 等待时间:取决于机器人目前在轨道上的位置,最坏情况可能等整整一圈
多站点智慧派送(鸿匠架构):
厨师A 备好料理→ 系统即时指派最近机器人→ 最近机器人「靠站」接单→ 立即出发送餐
→ 等待时间:趋近于零,厨房端排队机制被系统性消除
鴻匠科技提供展店前Ai模拟代跑,依据餐厅图面与轨道路径配置,近一步建议轨道送餐机器人数量,最大化你的餐厅营运效率。
2. 多站点架构对餐厅营收的实际影响
多站点智慧派送,不只是让出菜「感觉快一点」而已,它对餐厅实际获利的帮助是非常具体的。 当出餐等待时间大幅缩短,端到客人面前的菜就会更热、更好吃,顾客满意度自然提升,加点意愿也会增加。更重要的是,它让厨房辛苦做好的每一道菜,都能更快送到桌上,不再被卡在出餐口白白浪费时间。 这样一来,厨房的产能才能真正转化成营收,而不是被「出餐到上桌的时间」吃掉一大块。 根据实际部署数据,使用多站点智慧派送的餐厅:
实测数据:部署多站点智慧派送架构的餐厅,出餐transit time 缩短达60%, 翻桌率平均提升28%。
速度更快、轨道利用率更高、翻桌率跟着往上冲,最终直接反映在当月的餐厅营收。
走访过许多餐厅,最常看到厨房端排队问题严重的,就是寿司店、烧肉店和火锅店。火锅一桌要同时上多锅汤底,烧肉店需要不断补生肉盘,现做手卷一做好就必须马上送出去——这些品项全挤在单一出餐口,常常看到师傅已经做好,机器人或服务员却还在排队等候。 第一次看到多站点智慧派送实际运作时,就可以明显感受到差异:原本要等45~70 秒才能取餐的热门品项,现在平均只需12~18 秒就有一台机器人抵达出餐口。师傅做完菜几乎不用停手,菜品直接被带走,那种「卡住的感觉瞬间消失」的流畅度,让餐厅老板们都印象非常深刻。

▲ 多站点智慧派送允许在多个厨房出餐口同时接收任务。
五、这笔钱怎么算:从人力送餐的营运费用到设备固定资产的财务视角
讲完三个技术维度,现在回到老板最在意的问题:这笔钱怎么算?
很多餐厅经营者第一次看到轨道送餐机器人系统的报价,会把它归类成一笔「支出」, 然后拿去跟同等金额的月租、装潢或设备维修费比较——这个框架从一开始就设错了。 送餐人力薪资是营运费用(OpEx):它每个月烧,每年跟着最低薪资调涨, 还不折旧、不能抵税也没有终止日期。 轨道送餐机器人是固定资产(CapEx):它有折旧摊提、可能的税务效益, 以及一个明确的回本周期(payback period) ——回本之后,每天的出餐服务几乎是零边际成本。
| 财务维度 | 传统人工送餐 | 鸿匠轨道送餐机器人推荐 | 差异说明 |
|---|---|---|---|
| 费用分类 | 营运费用— 永久性、不可折旧 | 固定资产— 可折旧固定资产 | 第一年即有税务效益 |
| 每月成本轨迹 | 薪资+ 劳健保+ 招募成本(每年调涨) | 折旧摊提后趋近于零 | 营运费用在根本上削减 |
| 出餐稳定性 | 受员工状态、请假、离职影响 | 24/7 稳定运作,零情绪零变异 | 服务品质一致性提升 |
| 尖峰承载能力 | 人力上限就是产能上限,超载即失序 | 提升轨道利用率,处理量能变大 | 营运效率低下被移除 |
| 人员流动成本(Attrition) | 每名离职送餐员工的替换成本不可忽略 | 零——无招募、无训练、无离职 | 消除隐性摩擦成本 |
| 营运费用回本周期 | 无(持续性营运费用支出、负债) | 8–12 个月(已验证) | 回本后每日皆为获利贡献 |
| 五年成本轨迹 | 持续上升(通膨+ 法定调薪) | 折旧后趋近稳定 | 长期复利式优势 |
▲ 人工送餐vs. 鸿匠轨道送餐机器人:营运费用vs. 固定资产财务对比(资料来源:鴻匠科技客户追踪数据)
💰 设备(固定资产)回本周期试算框架(完整变数清单)
公式:设备总费用÷ 每月营运节省费用= 回本月数
分母应纳入的完整营运费用变数:
— 前场送餐人力薪资(全职+ 兼职)
— 雇主劳健保与退休金提拨
— 年均招募摩擦成本(面试、训练、试用期低效率期间的隐性损失)
— 人员流失率造成的服务空窗损失
加速回本的额外收益来源(建议纳入试算,但不计入基础公式):
— 翻桌率提升带来的额外客席收益
— 食材损耗率下降带来的获利改善
— 服务品质稳定后顾客回访率提升的长期营收效益
建议联系鴻匠科技顾问,根据您的实际人力结构与平面图进行客制化试算。
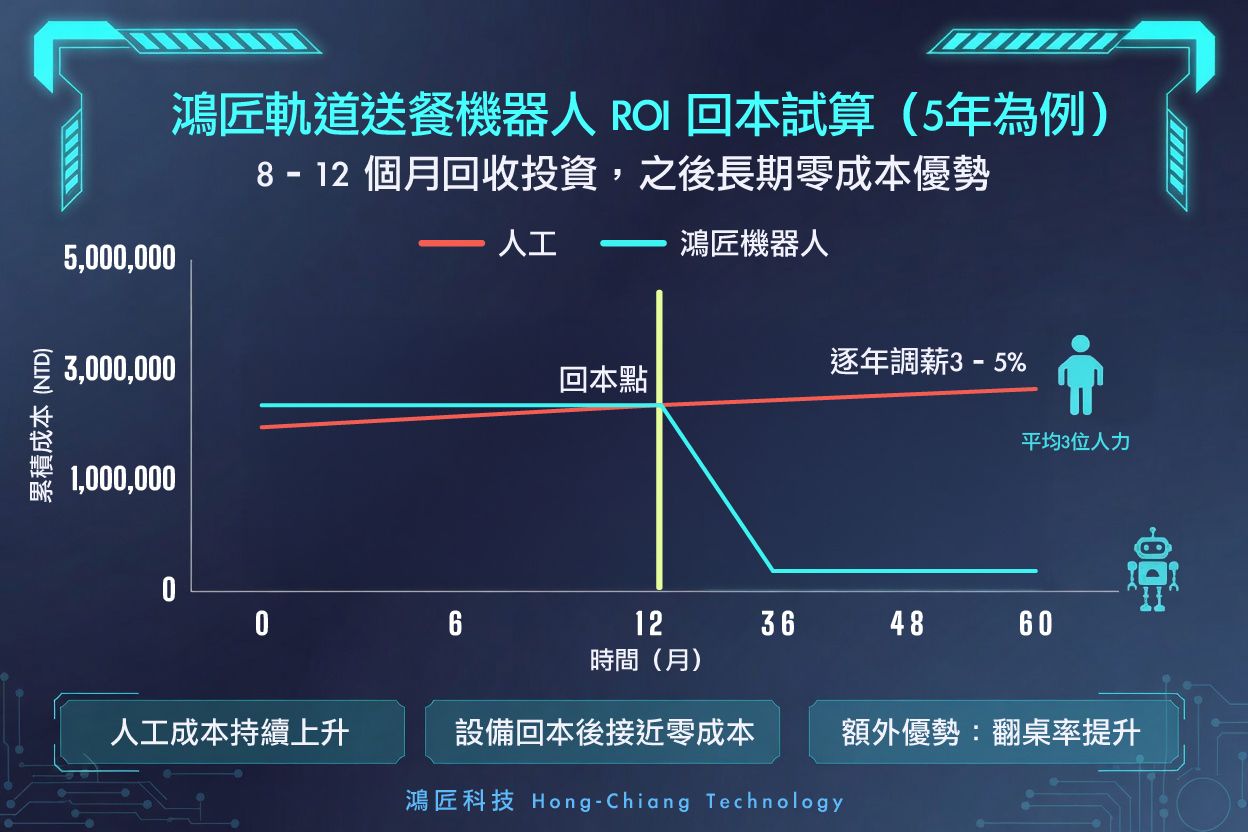
▲ 人工成本上升曲线vs. 机器人旧趋零。
六、实际案例:烧肉店8 个月设备回本的完整拆解
理论说完,来看一个真实数字。一家知名烧肉连锁品牌,在26 个用餐座位的店型导入鴻匠科技的E 型+ I 型客制化轨道送餐机器人系统, 正面解决了尖峰时段订单堵塞、出餐迟缓、服务员体力透支的三重痛点。
| 指标 | 导入前 | 导入后 | 改善幅度 |
|---|---|---|---|
| 出餐时间 | 平均4.5 分钟 | 平均1.8 分钟 | 缩短60% |
| 翻桌率 | 午餐2.1 次/ 晚餐1.8 次 | 午餐2.7 次/ 晚餐2.3 次 | 平均提升28% |
| 每年人力送餐营运费用节省 | — | 约NT$180,000 | 人力送餐营运费用直接归零 |
| 前场人员离职率 | 高(导入前年均超过2 人离职) | 显著下降 | 隐性招募成本消除 |
| 固定资产(设备)回本周期 | — | 8 个月 | 优于预估的8–12 个月上限 |
▲ 烧肉连锁品牌导入鸿匠轨道送餐机器人前后对比数据(资料来源:客户POS 系统记录与人力工时实测)
知名连锁烧肉店经营者,当初最犹豫的就是「怕改变太大,员工会反弹」。他担心轨道和机器人会打乱现有动线,也怕师傅和服务人员不习惯新系统,影响现场氛围。 鸿匠团队跟他一起现场丈量、模拟尖峰动线,并用数据算出人力节省与翻桌率提升的ROI,才逐渐打消他的顾虑。导入第一周,鸿匠特别留在现场观察:原本尖峰时出餐口永远塞车、服务生满头大汗跑来跑去的混乱场面不见了。机器人稳定地在轨道上穿梭,师傅做完肉盘几乎不用等待,员工也很快适应,甚至有人说「终于不用一直跑断腿了」。 那种从混乱到井然有序的转变,连店长看了都觉得震撼。
七、老板最常问的五个问题
八、速度拉满之后,老板一定会问的下一个问题
读到这里,如果你已经接受「1.3 m/s 的极速确实能把出餐时间压下来」这件事, 那么下一个闪过脑袋的问题,几乎一定是这个:
「机器人跑这么快,我的热汤、火锅汤底、烧肉酱料不会洒出来吗?万一洒到客人,我要怎么办?」
这是一个非常严肃的议题,而且在美国与欧洲市场,「洒出来」不只是摆盘难看的问题—— 烫伤事故在法律意义上是一个人身伤害诉讼事件, 涉及的理赔与法律费用,往往远超过一套送餐机器人的设备成本。
下一篇专题文章,我们要把这个问题从物理原理层面彻底说清楚: 为什么速度快了反而能做到液体不晃动? 什么是S型速度曲线控制? 梯形速度曲线和S 型速度曲线的加速度差异,如何在物理上决定了液体的位移量? 以及鸿匠的系统为什么能在全球3,000 家以上的餐厅——包括美国一家用高脚杯送调酒的酒吧——达到零溢出的验证记录。
📚 数据来源与参考资料
- 鴻匠科技股份有限公司—轨道送餐机器人技术规格认证报告(2026)
- 鴻匠科技股份有限公司—多市场客户部署追踪报告:翻桌率、送餐时间与设备回本数据(2025–2026)
- 烧肉连锁品牌案例—导入前后POS 系统数据对比(2025 Q3–Q4)
- 日商环球讯息有限公司(GII) —全球餐厅配送机器人市场


