
คู่มือการซื้อ 2026 ซูชิเทรน (หุ่นยนต์ส่งอาหาร) และสายพานซูชิ
2026 การทำงานอัตโนมัติของร้านอาหารทั่วโลก: ทำไมหุ่นยนต์ส่งอาหารจึงเป็นอนาคตของการรับประทานอาหาร
ในปี 2026 อุตสาหกรรมร้านอาหารทั่วโลกเผชิญกับแรงกดดันสามประการ ได้แก่ การขาดแคลนแรงงาน ค่าเช่าสูง และความต้องการด้านสุขอนามัย — ทำให้สายพานส่งซูชิแบบดั้งเดิมไม่สามารถตามทันได้ บทความนี้นำเสนอการวิเคราะห์เชิงลึกเกี่ยวกับ Hong Chiang Technology's ซูชิเทรน (หุ่นยนต์ส่งอาหาร): ข้อได้เปรียบทางเทคนิคหลักห้าประการ ได้แก่ การส่งมอบความเร็วสูง การป้องกันการหกแบบ S-curve การออกแบบตัวถังที่บางพิเศษ อัลกอริธึมระยะห่างตามแบบไดนามิก และการรับประกันคุณภาพจาก MIT.
📌 บทสรุปผู้บริหาร
อุตสาหกรรมการบริการระดับโลกไม่ต้องเผชิญกับอุปสรรคด้านการจัดหาพนักงานชั่วคราวอีกต่อไปแล้ว.ภายในปี 2026 มันได้เข้าสู่สถานะถาวรของ วิกฤตแรงงานเชิงโครงสร้าง — ซึ่งถูกซ้ำเติมโดยกฎหมายค่าจ้างขั้นต่ำที่เข้มงวด, ความกดดันจากค่าเช่าที่เพิ่มขึ้น, และความเสี่ยงด้านความรับผิดที่เพิ่มขึ้นจากการบริการที่ไม่สอดคล้องกัน.การพึ่งพาโครงสร้างพื้นฐานที่ขับเคลื่อนด้วยสายพานแบบพาสซีฟ เช่น สายพานส่งซูชิ ไม่สามารถให้ความคล่องตัวในการดำเนินงานที่จำเป็นในการปกป้องกำไรได้อีกต่อไป.ระบบหุ่นยนต์ส่งของติดตาม ของHong Chiang Technology ตอบสนองต่อแรงกดดันเหล่านี้โดยตรง: ความเร็วในการขนส่งสูงสุดที่ได้รับการตรวจสอบที่1.3 m/s, การซิงโครไนซ์ของฟลีทที่มีระยะห่างตามหลังน้อยกว่า2 นิ้ว (5 ซม.) , การป้องกันการหกที่ได้รับสิทธิบัตรโปรไฟล์การเคลื่อนไหวแบบ S-curve ที่กำจัดการบาดเจ็บจากการถูกน้ำร้อนลวก, และออกแบบในไต้หวัน การผลิตระดับอุตสาหกรรม — ใช้งานในร้านอาหารมากกว่า 3,000 แห่งในสหรัฐอเมริกา, ยุโรป, และญี่ปุ่น.ผู้ประกอบการรายงานผลตอบแทนที่สม่ำเสมอ ภายใน 8–12 เดือน โดยมีการใช้งานที่ครอบคลุมซูชิแบบเคลื่อนที่, ชาบู, ยากินิกุ, และบริการเส้นทางคงที่ใด ๆ ที่เผชิญกับการขาดแคลนแรงงานในโครงสร้าง.
สารบัญ
- I. กรณีโครงสร้างที่ต่อต้านสายพานซูชิแบบเก่าในปี 2026
- II. ข้อได้เปรียบด้านประสิทธิภาพ 1: ความเร็วในการขนส่งที่ตรวจสอบได้และการควบคุมความหนาแน่นของฟลีท
- III. ข้อได้เปรียบด้านประสิทธิภาพ 2: โปรไฟล์การเคลื่อนไหวแบบ S-Curve — การกำจัดความรับผิดชอบในการหกที่ความเร็ว
- IV. ข้อได้เปรียบด้านประสิทธิภาพ 3: การปฏิบัติตามรางแบบไม่มีการยื่นออก — การใช้ที่นั่งให้เกิดประโยชน์สูงสุด
- V. ข้อได้เปรียบด้านประสิทธิภาพ 4: ความน่าเชื่อถือระดับอุตสาหกรรมและโครงสร้างพื้นฐานการสนับสนุนทั่วโลก
- VI. มาตรฐานสเปคปี 2026: ฮงเจียง vs. ระบบเก่า
- VII. โมเดลทางการเงิน: CapEx vs. OpEx — กรณีการคืนทุนใน 8–12 เดือน
- VIII. คำถามที่พบบ่อยจากผู้ปฏิบัติงาน
- IX. การประเมิน: เมื่อใดที่การทำงานอัตโนมัติกลายเป็นสิ่งที่ไม่สามารถหลีกเลี่ยงได้?
I. กรณีโครงสร้างที่ต่อต้านสายพานซูชิแบบเก่าในปี 2026
สายพานซูชิ — หรือระบบซูชิไคเทน — เป็นนวัตกรรมการดำเนินงานที่แท้จริงเมื่อมันเกิดขึ้นจากญี่ปุ่นในปี 1950 และขยายตัวในเชิงพาณิชย์ในช่วงปี 1990 การหมุนเวียนของสายพานแบบพาสซีฟได้แก้ปัญหาที่แท้จริง: มันลดแรงงานที่จำเป็นในการส่งจานอาหารไปยังโต๊ะแต่ละโต๊ะในขณะที่สร้างผลกระทบด้านการตลาดที่น่าสนใจ สำหรับระยะเวลา 30 ปี รูปแบบนี้ได้ผลดี"
สภาพแวดล้อมการทำงานในปี 2026 ได้ทำให้สมมติฐานเหล่านั้นไม่ถูกต้อง.สายพานซูชิเป็น โครงสร้างพื้นฐานที่มีจุดล้มเหลวเดียว: มอเตอร์กลางตัวเดียวขับเคลื่อนสายพานต่อเนื่องตลอดทั้งชั้นรับประทานอาหาร.เมื่อสายพานหยุดทำงาน — เนื่องจากความล้มเหลวของมอเตอร์ การขัดขวาง หรือการสึกหรอทางกล — ระบบการส่งมอบทั้งหมดจะหยุดทำงานพร้อมกัน.ไม่มีการกู้คืนบางส่วน ไม่มีการแยกข้อผิดพลาด ไม่มีวิธีแก้ไข.ในระหว่างการบริการอาหารค่ำวันศุกร์ที่มีความจุเต็ม ความล้มเหลวนี้ไม่ใช่ความไม่สะดวก;นี่คือเหตุการณ์รายได้ที่สมบูรณ์.
⚠️ สามข้อบกพร่องโครงสร้างของระบบสายพานลำเลียงซูชิแบบเก่า
① ความล้มเหลวแบบจุดเดียวที่ส่งผลกระทบต่อกัน: ความผิดพลาดของมอเตอร์หรือสายพานทำให้บริการทั้งหมดหยุดทำงานโดยไม่มีตัวเลือกการกู้คืนบางส่วน — ความเสี่ยงในช่วงเวลาที่มีการใช้งานสูงจะถูกกระจุกตัวอยู่ในส่วนประกอบทางกลเพียงส่วนเดียวอย่างไม่สามารถยอมรับได้.
② การแลกเปลี่ยนระหว่างความเร็วและความรับผิด: การเพิ่มความเร็วของสายพานทำให้เกิดเหตุการณ์การหก ซึ่งมีผลกระทบโดยตรงต่อค่าใช้จ่ายด้านอาหารและในตลาดสหรัฐอเมริกาและสหภาพยุโรป อาจมีความเสี่ยงจากการลื่นล้มหรือการถูกน้ำร้อนลวก.ผู้ปฏิบัติงานถูกบังคับให้ลดความเร็วต่ำกว่าขีดจำกัดที่มีประสิทธิภาพ.
③ ความยืดหยุ่นของความจุเป็นศูนย์: ความยาวของสายพานถูกกำหนดไว้ที่การติดตั้ง.ไม่มีระบบในการเพิ่มอัตราการผลิตในช่วงที่มีปริมาณการใช้งานสูงเกินไป และการจัดที่นั่งถูกจำกัดอย่างถาวรโดยเส้นทางทางกายภาพของสายพาน.
ข้อจำกัดเหล่านี้กำลังเพิ่มขึ้นในปี 2026 ในช่วงเวลาที่ไม่เหมาะสมอย่างยิ่ง.ผู้ประกอบการร้านอาหารในสหรัฐฯ ต้องเผชิญกับอัตราค่าจ้างขั้นต่ำของรัฐบาลกลางที่เพิ่มขึ้นอย่างมาก ในขณะที่ข้อกำหนดในระดับรัฐในแคลิฟอร์เนีย นิวยอร์ก และวอชิงตันได้ผลักดันต้นทุนแรงงานในส่วนหน้าที่มีผลบังคับใช้ให้สูงขึ้นอีกอัตราการเปลี่ยนแปลงโครงสร้างในกลุ่มร้านอาหารบริการเต็มรูปแบบอยู่ที่ 70–80% ต่อปี — พนักงานที่ออกจากงานแต่ละคนจะมีค่าใช้จ่ายในการแทนที่ประมาณ $2,300 เมื่อมีการคำนวณการสรรหา การฝึกอบรม และการเพิ่มผลผลิตอย่างเต็มที่.ผู้ประกอบการที่ใช้ระบบสายพานซูชิแบบเก่าจะต้องรับภาระค่าใช้จ่ายในการดำเนินงานทั้งหมดนี้โดยไม่มีประโยชน์จากการตัดค่าเสื่อมราคา ไม่มีการจัดการภาษีในฐานะสินทรัพย์ถาวร และไม่มีการปรับปรุงเพดานประสิทธิภาพในแต่ละปี

▲ การเปลี่ยนแปลงทางสถาปัตยกรรม: Hong Chiang Technology หุ่นยนต์ส่งของ (พลังงานกระจาย) เทียบกับสายพานซูชิเก่า (มอเตอร์รวมศูนย์). ความแตกต่างในความทนทานต่อข้อผิดพลาดไม่ใช่แบบเพิ่มขึ้น — แต่มันเป็นแบบหมวดหมู่.
การตอบสนองทางวิศวกรรมของ Hong Chiang Technology เป็นการตอบสนองเชิงโครงสร้าง: ย้ายพลังงานขับเคลื่อนจากสายพานไปยังหุ่นยนต์แต่ละตัว เส้นทางกลายเป็นเส้นทางการนำทาง ไม่ใช่แหล่งพลังงาน หน่วยแต่ละตัวล้มเหลวอย่างอิสระและถูกเปลี่ยนในเวลาไม่ถึงหนึ่งนาทีโดยไม่หยุดบริการของฝูงบิน สิ่งที่ดูเหมือนการอัปเกรดผลิตภัณฑ์จริง ๆ แล้วเป็นการจำแนกประเภททางสถาปัตยกรรมใหม่ — จากโครงสร้างพื้นฐานที่เปราะบางและรวมศูนย์ไปสู่ฝูงบินที่มีความยืดหยุ่นและกระจายตัว.
โมเดลการใช้งานเชิงพาณิชย์ของฮงเชียงถูกสร้างขึ้นโดยรอบการอัปเกรดที่ไม่รบกวน: ผู้ดำเนินการสามารถปรับปรุงโครงสร้างพื้นฐานของรางที่มีอยู่ได้โดยไม่ต้องปิดเพื่อการก่อสร้าง. เมื่อประวัติการดำเนินงานของกองเรือสะสมในตลาดต่างๆ โมเดลก็เติบโตขึ้น. วันนี้ ฮงเจียงทำหน้าที่เป็นพันธมิตรในการเปลี่ยนแปลงอย่างเต็มที่สำหรับเครือข่ายหลายหน่วย — เปลี่ยนโครงสร้างพื้นฐานของสายพานส่งซูชิทั้งหมดและรวมระบบหุ่นยนต์ส่งอาหารเข้ากับระบบ POS, จอแสดงผลในครัว และแพลตฟอร์มการจัดการสินค้าคงคลังที่มีอยู่. เอนจินการจำลอง AI ที่เป็นกรรมสิทธิ์ของบริษัทช่วยให้ผู้ปฏิบัติงานสามารถสร้างแบบจำลองการส่งมอบ การจัดที่นั่ง และสถานการณ์การให้บริการในช่วงเวลาที่มีคนหนาแน่นก่อนที่จะเริ่มการติดตั้ง — ความสามารถที่ไม่มีจากผู้ขายคู่แข่งในหมวดหมู่นี้.
II. ข้อได้เปรียบด้านประสิทธิภาพ 1: ความเร็วในการขนส่งที่ตรวจสอบได้และการควบคุมความหนาแน่นของฟลีท
1. 1.3 เมตร/วินาที: ข้อมูลความเร็วที่ได้รับการตรวจสอบจากสาธารณะเพียงหนึ่งเดียวในหมวดหมู่
ความเร็วในการขนส่งในระบบบริการอาหารอัตโนมัติไม่ใช่ตัวแปรทางการตลาด — แต่มันเป็นปัจจัยหลักที่กำหนดการส่งมอบ และการส่งมอบควบคุมประสิทธิภาพการหมุนเวียนโต๊ะโดยตรง.หุ่นยนต์จัดส่งตามรางของ Hong Chiang Technology ทำงานที่ความเร็วสูงสุดที่ได้รับการรับรองที่ 1.3 เมตรต่อวินาที (ประมาณ 4.3 ฟุต/วินาที) .นี่คือข้อกำหนดความเร็วที่เปิดเผยต่อสาธารณะเพียงข้อเดียว ซึ่งสามารถตรวจสอบได้อย่างอิสระในหมวดหมู่การทำงานอัตโนมัติของร้านอาหาร.
เพื่อให้เห็นภาพความเร็วนี้: ในร้านซูชิแบบ kaiten ขนาดกลางทั่วไปที่มีรางยาว 20 เมตร หุ่นยนต์ Hong Chiang สามารถเดินทางจากครัวไปยังโต๊ะที่ไกลที่สุดในเวลาไม่ถึง 13 วินาที.
เมื่อเปรียบเทียบกับระบบสายพานซูชิแบบเก่า ระบบเหล่านี้มีความเร็วสูงสุดเพียง 0.1–0.5 เมตร/วินาที ซึ่งเป็นความเร็วที่มักจะไม่สามารถตอบสนองความต้องการของการบริการที่มีปริมาณสูงและการหมุนโต๊ะอย่างรวดเร็วได้ ช่องว่างในด้านประสิทธิภาพนี้มีความสำคัญ ในช่วงเวลาการบริการที่มีความต้องการสูง 90 นาที การจัดส่งตามความต้องการที่รวดเร็วของฮงเจียงสามารถเพิ่มจำนวนที่นั่งที่ให้บริการได้เกือบสองเท่าเมื่อเปรียบเทียบกับระบบสายพานแบบดั้งเดิม.
ระบบหุ่นยนต์ส่งอาหารที่แข่งขันส่วนใหญ่ยังไม่สามารถทำความเร็วได้สูงขึ้นอย่างมีนัยสำคัญ เนื่องจากพวกเขายังไม่สามารถเอาชนะความท้าทายในการป้องกันการหกและการเคลื่อนที่ของของเหลวที่ความเร็วสูงได้.
มีมิติค่าใช้จ่ายรองในโมเดลสายพานซูชิเก่าที่ผู้ดำเนินการมักจะนับไม่ครบ: การหดตัวของอาหาร.รูปแบบการหมุนเวียนของสายพานขึ้นอยู่กับการที่จานอาหารยังคงมองเห็นได้และดึงดูดความสนใจของผู้ที่เดินผ่านไปมา.โปรโตคอลความปลอดภัยด้านอาหาร — รวมถึง ระบบความสดของซูชิ ของฮงเจียง — ต้องการให้จานอาหารถูกนำออกจากการหมุนเวียนเมื่อเวลาที่อยู่เกินเกณฑ์ที่กำหนด.ในปฏิบัติการที่มีปริมาณสูง สิ่งนี้สร้างการลดต้นทุนอาหารที่ตรวจสอบได้อยู่ที่ 8% ถึง 15% — เป็นผลกระทบโดยตรงต่อ COGS ที่การจัดส่งตามความต้องการกำจัดออกไปโดยสิ้นเชิงโดยการส่งจานไปยังคำสั่งที่ยืนยันแทนที่จะหมุนเวียนอย่างไม่แน่นอน.
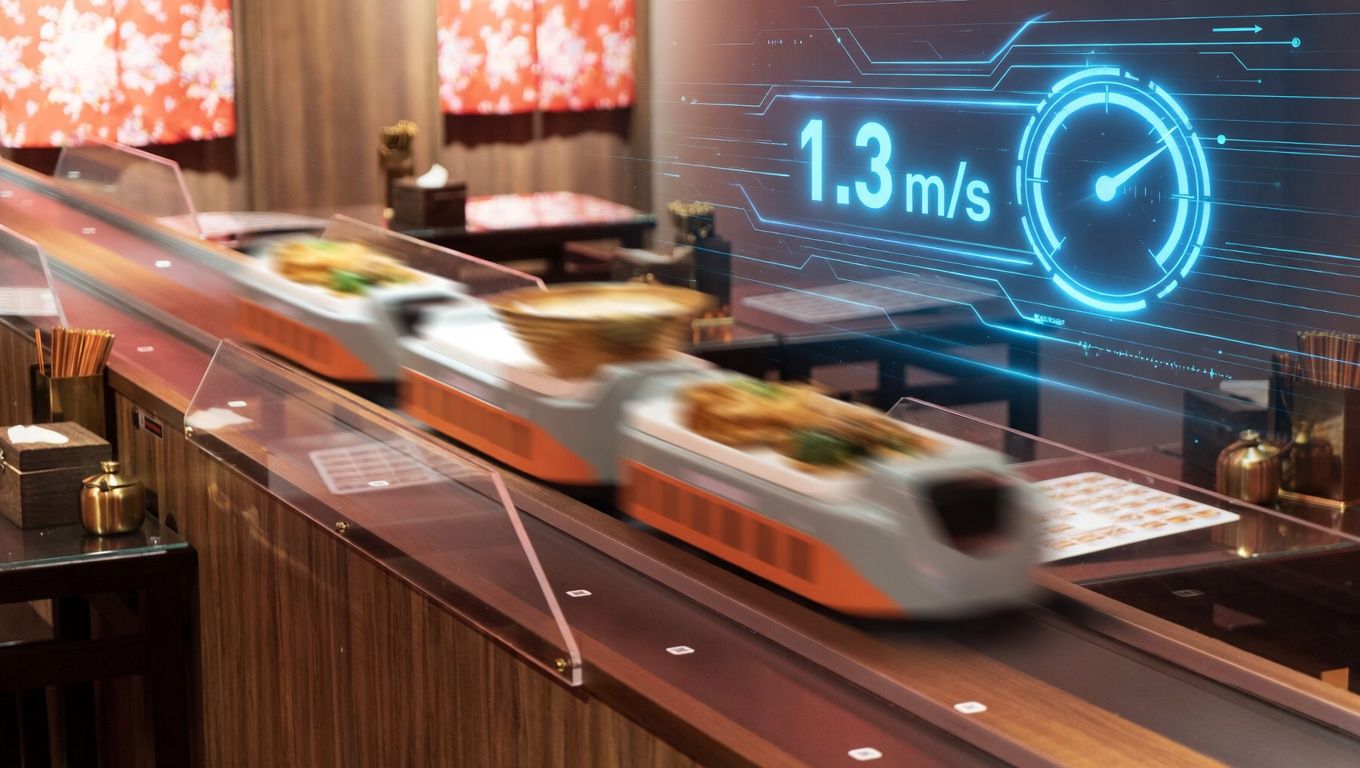
▲ หุ่นยนต์ส่งของ Hong Chiang: ความเร็วในการขนส่งที่ได้รับการรับรอง 1.3 ม./วินาที — ตัวเลขประสิทธิภาพที่ได้รับการตรวจสอบโดยสาธารณะเพียงตัวเดียวในหมวดหมู่การทำงานอัตโนมัติของร้านอาหาร.
2. การซิงโครไนซ์ฟลีตต่ำกว่า 2 นิ้ว: การใช้แทร็ก 20 เท่าของระบบคู่แข่ง
ความเร็วสูงสุดสร้างการส่งข้อมูลได้ก็ต่อเมื่อความหนาแน่นของฝูงบินก้าวทัน.กรรมสิทธิ์ของ Hong Chiang อัลกอริทึมควบคุมระยะห่างแบบไดนามิก ช่วยให้หุ่นยนต์ส่งของแบบรางหลายตัวสามารถรักษารูปแบบที่ซิงโครไนซ์โดยมีช่วงห่างน้อยกว่า 5 ซม. (ประมาณ 2 นิ้ว) โดยไม่มีการสัมผัสกัน
ระบบที่แข่งขันกัน — ซึ่งข้อมูลวิศวกรรมถูกเปิดเผย — มักต้องการระยะห่างขั้นต่ำ 100 ซม. หรือมากกว่าเพื่อป้องกันการชนกันแบบต่อเนื่อง.ในทางตรงกันข้าม, อัลกอริทึมควบคุมระยะห่างแบบไดนามิก ที่เป็นกรรมสิทธิ์ของ Hong Chiang ช่วยให้การทำงานที่ปลอดภัยและซิงโครไนซ์ โดยมีระยะห่างต่ำกว่า 2 นิ้ว (5 ซม.)เมื่อรวมกับระบบการจัดการฟลีท AI ขั้นสูงของเรา สิ่งนี้ช่วยให้ผู้ปฏิบัติงานสามารถนำฟลีทที่มีขนาดใหญ่ขึ้นอย่างมีนัยสำคัญ (มากกว่า 100 หน่วย) มาใช้บนโครงสร้างพื้นฐานของรางเดียวกันโดยไม่มีความแออัดหรือความเสี่ยงจากการชน — ส่งผลให้เกิดการปรับปรุงที่สำคัญในด้านการใช้รางและการส่งมอบโดยรวมเมื่อเปรียบเทียบกับระบบเก่า.
อัลกอริธึมบรรลุเป้าหมายนี้ผ่านการตรวจจับตำแหน่งและความเร็วของหน่วยแต่ละหน่วยแบบเรียลไทม์อย่างต่อเนื่อง โดยปรับโปรไฟล์การเร่งความเร็วของแต่ละหน่วยอย่างมีพลศาสตร์เพื่อรักษาความสมบูรณ์ของการจัดรูปแบบที่ความเร็ว TOF (Time-of-Flight) การตรวจจับอุปสรรคให้ชั้นความปลอดภัยเพิ่มเติม: วัตถุต่างประเทศใด ๆ บนเส้นทางจะกระตุ้นให้หน่วยที่ได้รับผลกระทบชะลอความเร็วอย่างค่อยเป็นค่อยไป — ไม่ใช่การหยุดอย่างกระทันหัน — เพื่อรักษาโมเมนตัมของฝูงบินในขณะที่ทำให้เหตุการณ์การชนเป็นกลาง.
📊 ความหนาแน่นของฟลีท: คณิตศาสตร์การใช้ประโยชน์
ระบบที่แข่งขัน (ระยะห่างมากกว่า 100 ซม.): สนาม 20 เมตร → 10~11 หน่วย การใช้งานพร้อมกันสูงสุด
Hong Chiang Technology (ระยะห่างน้อยกว่า 2 นิ้ว): สนาม 20 เมตร → 55~65 หน่วย การใช้งานพร้อมกันสูงสุด
อัตราการใช้สนามเป็นตัวคูณที่ซ่อนอยู่ใน ROI ของฮาร์ดแวร์.ความหนาแน่นที่สูงขึ้นหมายถึงการส่งผ่านที่มากขึ้นจากการลงทุนที่เท่าเดิม — โดยไม่ต้องวางรางเพิ่มแม้แต่ฟุตเดียว.
III. ข้อได้เปรียบด้านประสิทธิภาพ 2: โปรไฟล์การเคลื่อนไหว S-Curve — การกำจัดความรับผิดชอบในการหกที่ความเร็ว
1. ทำไมการหกจึงเป็นความเสี่ยงทางกฎหมาย ไม่ใช่แค่ความรำคาญในการดำเนินงาน
ผู้ดำเนินการทุกคนที่ได้ประเมินการจัดส่งอัตโนมัติในระดับใหญ่จะถึงจุดเปลี่ยนเดียวกัน: ระบบทำงานได้รวดเร็ว แต่ทำงานได้อย่างปลอดภัยกับของเหลวร้อนหรือไม่?ในการดำเนินงานภายในประเทศสหรัฐอเมริกา คำถามนี้มีมิติที่เกินกว่าการนำเสนออาหาร.ชามน้ำซุปราเมนที่หก — บนแขก, บนพนักงาน, หรือบนพื้นผิวที่ใช้ร่วมกัน — ไม่ถือเป็นข้อผิดพลาดในการบริการ.ภายใต้มาตรฐานการละเมิดของสหรัฐอเมริกา มันเป็นเหตุการณ์ที่อาจเกิดขึ้น ความรับผิดชอบต่อการบาดเจ็บส่วนบุคคล: ความเสี่ยงจากการลื่นล้มบนพื้นผิวเปียก, การเรียกร้องค่าเสียหายจากการถูกน้ำร้อนลวกจากแขกที่ถูกลวก, และการเปิดเผยต่อ OSHA สำหรับพนักงานในเขตบริการ.
หุ่นยนต์ส่งอาหารรุ่นเก่า — และระบบสายพานส่งซูชิที่พวกเขาถูกออกแบบมาเพื่อแทนที่ — ใช้ โปรไฟล์ความเร็วแบบรูปทรงสี่เหลี่ยมคางหมู: การเร่งความเร็วสูงสุดไปยังความเร็วในการทำงาน ตามด้วยการชะลอความเร็วอย่างรวดเร็วเพื่อหยุด.โปรไฟล์การเคลื่อนไหวนี้มีประสิทธิภาพทางกลสำหรับสินค้าหมายถึงแห้ง.เมื่อนำไปใช้กับของเหลวในภาชนะเปิด จะสร้างแรงเฉื่อยที่คาดเดาได้ในช่วงการเร่งความเร็วและการเบรกทั้งสองเหตุการณ์.ฟิสิกส์ไม่มีความคลุมเครือ: การเคลื่อนที่ของของเหลวมีสัดส่วนกับการกระตุก (อัตราการเปลี่ยนแปลงของการเร่ง) และโปรไฟล์รูปทรงสี่เหลี่ยมคางหมูจะสร้างการกระตุกสูงสุดในช่วงเวลาที่แขกมีแนวโน้มที่จะยื่นมือไปยังคำสั่งของพวกเขามากที่สุด.

▲ โปรไฟล์การเคลื่อนไหวแบบ S-curve (Hong Chiang) เทียบกับโค้งความเร็วแบบรูปสี่เหลี่ยม (ระบบเก่า): การกำจัดการกระตุกในช่วงการเร่งและการเบรกช่วยขจัดเงื่อนไขทางฟิสิกส์ที่ทำให้เกิดเหตุการณ์การหกหก.
2. โปรไฟล์การเคลื่อนไหวแบบ S-Curve: การควบคุมการเคลื่อนไหวในอุตสาหกรรมที่นำไปใช้กับบริการอาหาร
โซลูชันของ Hong Chiang คือการประยุกต์ใช้ การควบคุมโปรไฟล์การเคลื่อนที่แบบ S-curve ซึ่งเป็นโปรโตคอลการจัดการความเร็วมาตรฐานในระบบอัตโนมัติทางอุตสาหกรรมที่มีความแม่นยำ, การตัดเฉือน CNC และรถไฟความเร็วสูง มาสู่บริบทการจัดส่งในร้านอาหารโปรไฟล์ S-curve จะแบ่งเฟสการเร่งและการชะลอออกเป็นหลายส่วนที่ก้าวหน้า ทำให้เกิดการเปลี่ยนแปลงความเร็วที่ราบรื่นและต่อเนื่องโดยมีการกระตุกใกล้ศูนย์ตลอดเวลา.
การเปรียบเทียบเชิงประสบการณ์นั้นถูกต้อง: รถไฟชินคันเซ็นหรือรถไฟแมกเลฟที่ออกแบบมาอย่างดีเร่งความเร็วผ่านความแตกต่างของความเร็วที่เทียบเท่าโดยไม่สร้างแรงเฉื่อยที่รู้สึกได้ต่อผู้โดยสารหรือเครื่องดื่มของพวกเขา ฮงเจียงใช้หลักการควบคุมการเคลื่อนไหวที่เหมือนกันในระดับรางร้านอาหาร ผลลัพธ์ที่ได้รับการตรวจสอบ: วงจรการขนส่งเต็มรูปแบบที่ 1.3 เมตร/วินาทีโดยไม่มีเหตุการณ์การเคลื่อนที่ของของเหลวในระหว่างการทดสอบที่ควบคุมและในกว่า 3,000 การใช้งานเชิงพาณิชย์ที่ใช้งานอยู่.
จุดพิสูจน์ที่ต้องการมากที่สุดในพอร์ตโฟลิโอการติดตั้งของฮงเจียงคือสถานที่บาร์ในสหรัฐอเมริกาที่ระบบสามารถเสิร์ฟค็อกเทลในแก้วสูง — หมวดหมู่นี้แม้แต่การสั่นสะเทือนในระดับมิลลิเมตรก็ถือว่าขัดต่อการปฏิบัติงาน. ฮงเชียงเป็นผู้จำหน่ายเพียงรายเดียวในหมวดหมู่การทำงานอัตโนมัติของร้านอาหารที่ได้ดำเนินการติดตั้งที่ได้รับการตรวจสอบและยั่งยืนในสภาพแวดล้อมนั้น. ผลลัพธ์ยืนยันทั้งวิศวกรรมการเคลื่อนที่แบบ S-curve และความสมบูรณ์ของโครงสร้างของฮาร์ดแวร์ภายใต้เกณฑ์ความไวต่อการสั่นสะเทือนของการบริการเครื่องแก้วที่ละเอียดอ่อน.

▲ การติดตั้งที่ได้รับการตรวจสอบ: หุ่นยนต์ส่งของ Hong Chiang ขนส่งค็อกเทลในแก้วสูงที่บาร์ในสหรัฐอเมริกา — จุดพิสูจน์การบริการของเหลวที่มีความต้องการสูงที่สุดในหมวดหมู่การทำงานอัตโนมัติในร้านอาหาร.
💡 การประเมินความรับผิด: ค่าใช้จ่ายที่เกิดจากการหกจริง ๆ สำหรับผู้ประกอบการในสหรัฐอเมริกา
ต้นทุนโดยตรง: การทำซ้ำจาน (ต้นทุนอาหาร), การทำความสะอาดแทร็ก (เวลาทำงาน), การหยุดให้บริการระหว่างการทำความสะอาด.
ต้นทุนทางอ้อม: ความไม่พอใจของแขก, การละทิ้งโต๊ะก่อนรอบการสั่งซื้อต่อไป, ความเสี่ยงด้านความปลอดภัยของอาหารจากการปนเปื้อนข้ามของจานที่อยู่ใกล้เคียง.
ความเสี่ยงทางกฎหมาย: การเรียกร้องความรับผิดชอบจากการลื่นล้มในสถานที่, การเรียกร้องการบาดเจ็บจากการไหม้ของเหลว — ทั้งสองประเภทมีตัวเลขการตั้งถิ่นฐานเฉลี่ยในสหรัฐอเมริกาอยู่ในช่วง $15,000–$75,000 ก่อนค่าทนายความ.เหตุการณ์เดียวอาจเกินค่าใช้จ่ายในการดำเนินงานประจำปีของกองหุ่นยนต์ทั้งหมด.
โปรไฟล์การเคลื่อนไหวแบบ S-curve ไม่ใช่ฟีเจอร์เพื่อความสะดวกสบาย.นี่คือข้อกำหนดการจัดการความเสี่ยง.
IV. ข้อได้เปรียบด้านประสิทธิภาพ 3: การปฏิบัติตามรางที่ไม่มีการยื่นออกมา — การใช้ที่นั่งให้เกิดประโยชน์สูงสุด
พื้นที่ทุกตารางฟุตในแผนผังห้องรับประทานอาหารของคุณต้องสร้างรายได้. ในตลาดเมือง — นิวยอร์ก, ลอสแองเจลิส, ชิคาโก, ลอนดอน, โตเกียว — ค่าใช้จ่ายในการเข้าพักต่อฟุตมีระดับที่ความแตกต่างระหว่าง 28 และ 32 ที่นั่งในแผนชั้นหนึ่งคือความแตกต่างระหว่างโมเดลเศรษฐกิจหน่วยที่สามารถทำได้และไม่สามารถทำได้. โซลูชันการทำงานอัตโนมัติที่ต้องการให้ผู้ปฏิบัติงานขยายทางเดินบริการ ย้ายโต๊ะ หรือเสียสละที่นั่งของแขกเพื่อรองรับตัวถังอุปกรณ์ขนาดใหญ่และชิ้นส่วนกลไกที่เปิดออกไม่ได้เป็นการเพิ่มประสิทธิภาพแต่อย่างใด. มันคือการค้า.
1. การปฏิบัติตามเส้นทางที่ไม่มีการยื่นออก: รูปร่างเป็นรั้วป้องกันการแข่งขัน
ทีมวิศวกรรมของฮงเชียงได้กำหนดข้อจำกัดในการออกแบบที่ไม่สามารถเจรจาได้ในระหว่างการพัฒนา: ตัวถังหุ่นยนต์ต้องไม่เกินขอบเขตของรางในระหว่างการขนส่ง.ข้อจำกัดนี้ใช้กับส่วนที่เป็นเส้นตรง ผ่านโค้ง และ — ที่สำคัญ — ผ่านการเปลี่ยนมุมซึ่งที่มุมแรงเหวี่ยงจะทำให้การออกแบบตัวถังส่วนใหญ่ยื่นออกไป.
ผลกระทบที่เป็นรูปธรรมสำหรับการออกแบบแปลนพื้นมีความสำคัญอย่างมาก. ความปลอดภัยที่จำเป็นระหว่างขอบสนามและที่นั่งหรืออุปกรณ์ที่อยู่ใกล้เคียงสามารถลดลงให้เหลือน้อยที่สุดได้. โต๊ะสามารถตั้งอยู่ใกล้กับรางมากกว่าระบบการแข่งขันใด ๆ โดยไม่เพิ่มความเสี่ยงในการชนระหว่างหุ่นยนต์ที่เคลื่อนที่กับแขกที่อยู่ประจำ, เครื่องแก้ว, หรือเฟอร์นิเจอร์. ในรูปแบบเมืองที่กระชับ — สภาพแวดล้อมที่มีค่าเช่าสูงซึ่งผลตอบแทนจากการลงทุนในระบบอัตโนมัติเป็นสิ่งสำคัญที่สุด — ข้อได้เปรียบทางเรขาคณิตนี้สามารถกู้คืนได้สองถึงสี่ที่นั่งต่อการติดตั้งโดยไม่เปลี่ยนแปลงพื้นที่ทางกายภาพ.

▲ การปฏิบัติตามรางที่ไม่มีการยื่นออก: โครงหุ่นยนต์และกลไกฝาปิดยังคงอยู่ภายในขอบเขตรางตลอดสภาวะการขนส่ง — ส่วนตรง, โค้ง, และมุม ไม่มีการเสียสละพื้นที่ว่างเพื่อรูปทรงของอุปกรณ์.
2. การออกแบบที่จดสิทธิบัตรสำหรับการพับเข้าภายใน: การกำจัดเวกเตอร์การชนที่ซ่อนอยู่
หุ่นยนต์ส่งอาหารมาตรฐานใช้กลไกฝาปิดที่หมุนออกwards หรือป๊อปอัพที่ยื่นออกไปนอกตัวรถเมื่อเปิด ซึ่งสร้างเวกเตอร์การชนที่คาดเดาได้: แขกที่ยื่นมือไปหยิบคำสั่งซื้อของตน, พนักงานที่เดินผ่านในทางเดินข้างเคียง, แก้วหรือภาชนะเครื่องปรุงที่อยู่ใกล้เคียง — วัตถุใด ๆ เหล่านี้สามารถถูกสัมผัสโดยกลไกฝาปิดที่ไม่มีการรับรู้ถึงสภาพแวดล้อมของมันในระหว่างรอบการเปิด.
การปิดผนึกแบบพับเข้าได้ที่จดสิทธิบัตรของฮงเชียง Patented Inward-Folding Enclosure กำจัดเวกเตอร์นี้โดยสิ้นเชิง.การเปิดและปิดของฝาครอบแบบกลไกทั้งหมดจะอยู่ภายในขอบเขตของตัวถังหุ่นยนต์ตลอดเวลา — ไม่ว่าจะเป็นหน่วยที่หยุดนิ่งเพื่อรับคำสั่งหรือเคลื่อนที่ผ่านฝูงในความเร็วในการขนส่ง.ขนาดภายนอกสูงสุดของหุ่นยนต์นั้นคงที่และสามารถคาดการณ์ได้ในทุกสถานะการทำงาน.
มีข้อพิจารณาด้านวิศวกรรมรองที่ควรสังเกตสำหรับผู้ดำเนินการในสหรัฐอเมริกาที่ประเมินการติดตั้งเฉพาะไซต์: ระบบฝาปิดที่เปิดออกด้านนอกที่แข่งขันกันไม่สามารถติดตั้งแบบติดรางให้เรียบกับผนังหรือโครงสร้างที่ติดตั้งได้ เนื่องจากวงโคจรของฝาต้องการพื้นที่ว่างด้านที่เปิด. นี่มีผลบังคับให้มีความกว้างของทางเดินขั้นต่ำในทั้งสองด้านของการติดตั้งรางแข่งขันใด ๆ. การออกแบบที่พับเข้าด้านในของฮงเชียงไม่มีข้อจำกัดเช่นนั้น — รางสามารถติดตั้งกับผนัง, กั้นบูธ, หรือเสาค้ำที่ด้านใดด้านหนึ่งโดยไม่สูญเสียฟังก์ชันฝาหรือสร้างอันตรายในการให้บริการ.
🏠 คณิตศาสตร์การใช้ที่นั่ง: มูลค่ารายได้ของการฟื้นฟูที่นั่ง
ที่ค่าเฉลี่ยการตรวจสอบร้านอาหารแบบไม่เป็นทางการในสหรัฐอเมริกาที่$35–$55 ต่อคน และการหมุนโต๊ะ2.5× ต่อการบริการ โต๊ะสองที่นั่งเพิ่มเติมที่ฟื้นคืนจากการปรับปรุงทางเดินจะสร้างรายได้เพิ่มขึ้นประมาณ$175–$275 ต่อช่วงเวลาการบริการ.
ในปีที่ดำเนินการ 250 วัน โดยมีช่วงเวลาการบริการสองครั้งต่อวัน โต๊ะที่ฟื้นคืนสองโต๊ะจะมีส่วนช่วย$87,500–$137,500 ในรายได้รวมประจำปี — โดยไม่มีพื้นที่เพิ่มเติม.
(ตัวเลขเป็นเพียงการแสดงภาพ; ผลลัพธ์จริงขึ้นอยู่กับรูปแบบ ค่าเฉลี่ยการตรวจสอบ และอัตราการหมุนเวียน.)
V. ข้อได้เปรียบด้านประสิทธิภาพ 4: ความน่าเชื่อถือระดับอุตสาหกรรมและโครงสร้างพื้นฐานการสนับสนุนทั่วโลก
1. ข้อมูลจำเพาะของส่วนประกอบ: ความล้มเหลวระดับผู้บริโภคในสภาพแวดล้อมการทำงานของอุตสาหกรรม
อุปกรณ์ร้านอาหารทำงานในหนึ่งในสภาพแวดล้อมที่มีความเป็นมิตรทางกลและความร้อนน้อยที่สุดในแอปพลิเคชันเชิงพาณิชย์: การสัมผัสกับความชื้นสูงอย่างต่อเนื่องจากไอน้ำในครัว, การเปลี่ยนแปลงอุณหภูมิซ้ำ ๆ ในช่วงเวลาการให้บริการประจำวัน, การสะสมของไขมันและอนุภาคบนชิ้นส่วนกลไก, และการทำงานอย่างต่อเนื่องในช่วงเวลาที่มีปริมาณสูงสองช่วงโดยมีช่วงเวลาบำรุงรักษาน้อยที่สุด.โหมดการล้มเหลวที่เราสังเกตเห็นบ่อยที่สุดในการใช้งานหุ่นยนต์ส่งอาหารที่แข่งขันกันนั้นมีสาเหตุหลักมาจากสาเหตุเดียว: ข้อกำหนดของส่วนประกอบระดับผู้บริโภคที่นำไปใช้กับรอบการทำงานระดับอุตสาหกรรม.
มอเตอร์ร้อนเกินไปภายใต้ภาระที่ยาวนาน, ความล้มเหลวของแผงควบคุมที่เกิดจากความชื้นเข้าไป, และการเบี่ยงเบนของตัวเข้ารหัสจากการขยายตัวทางความร้อน — นี่ไม่ใช่ความล้มเหลวที่เกิดขึ้นโดยบังเอิญ. พวกเขาคือผลลัพธ์ที่คาดเดาได้จากการกำหนดส่วนประกอบที่มีการจัดอันดับสำหรับการใช้งานของผู้บริโภคแบบชั่วคราวในสภาพแวดล้อมที่ต้องการประสิทธิภาพทางอุตสาหกรรมอย่างต่อเนื่อง. หุ่นยนต์จัดส่งของฮงเชียงถูกกำหนดจากระดับส่วนประกอบขึ้นไปสำหรับการใช้งานเชิงพาณิชย์ตลอด 24 ชั่วโมง 7 วัน โดยมีการจัดการความร้อน การป้องกันการเข้าถึง และความทนทานทางกลที่ปรับเทียบสำหรับสภาพแวดล้อมการทำงานของร้านอาหาร — ไม่ใช่ห้องปฏิบัติการทดสอบผลิตภัณฑ์.

▲ ข้อกำหนดของส่วนประกอบระดับอุตสาหกรรม: หุ่นยนต์ส่งของ Hong Chiang ได้รับการจัดอันดับสำหรับการใช้งานเชิงพาณิชย์อย่างต่อเนื่อง — ไม่ใช่การใช้งานแบบผู้บริโภคที่ไม่สม่ำเสมอ — ในสภาพแวดล้อมร้านอาหารที่มีความชื้นสูงและอุณหภูมิสูงอย่างต่อเนื่อง.
2. โครงสร้างพื้นฐานการบำรุงรักษาเชิงพยากรณ์: การกำจัดเวลาหยุดทำงานที่ไม่คาดคิด
ความเชื่อถือได้ของฮาร์ดแวร์เป็นข้อกำหนดเบื้องต้น;การหลีกเลี่ยงความล้มเหลวเชิงพยากรณ์เป็นมาตรฐานการดำเนินงานที่ฮงเจียงมอบให้.ระบบของการติดตามวงจรชีวิตของส่วนประกอบแบบเรียลไทม์ จะติดตามระยะทางรวมที่เดินทาง, การสัมผัสความร้อน, และจำนวนรอบทางกลสำหรับทุกหน่วยในกองเรือที่ถูกติดตั้ง.เมื่อส่วนประกอบใด ๆ เข้าใกล้เกณฑ์การเปลี่ยนทดแทนตามการประกันภัย ระบบจะสร้างการแจ้งเตือนการบำรุงรักษาเชิงรุก — ก่อนที่จะเกิดเหตุการณ์ล้มเหลวขึ้น.
สำหรับความผิดปกติในซอฟต์แวร์ ฮงเจียง's แพลตฟอร์มการวินิจฉัยระยะไกลที่เชื่อมต่อกับคลาวด์ช่วยให้ทีมวิศวกรรมที่ตั้งอยู่ในไต้หวันสามารถระบุ วินิจฉัย และส่งโปรโตคอลการแก้ไขไปยังหน่วยที่ติดตั้งภายในไม่กี่นาทีหลังจากการตรวจพบความผิดปกติ — โดยไม่ต้องการการเยี่ยมชมจากช่างเทคนิคในสถานที่. สำหรับผู้ให้บริการในสหรัฐอเมริกาและยุโรป นี่หมายความว่าเวลาตอบสนองการสนับสนุนที่มีประสิทธิภาพสำหรับเหตุการณ์ส่วนใหญ่จะถูกวัดเป็นนาที ไม่ใช่วันทำการ. เมื่อมีความจำเป็นต้องมีการแทรกแซงฮาร์ดแวร์ในสถานที่ เครือข่ายพันธมิตรบริการระดับภูมิภาคของฮงเจียงจะรักษาสินค้าคงคลังของชิ้นส่วนที่เตรียมไว้ล่วงหน้า ซึ่งปรับขนาดตามข้อมูลความต้องการทางการประกันภัย — ไม่ใช่การคาดเดา — ในตลาดหลักในอเมริกาเหนือ ยุโรป และเอเชียแปซิฟิก.
การรายงานเหตุการณ์ที่เกี่ยวข้องกับลูกค้าได้ถูกรวมเข้ากับแผงควบคุมของผู้ปฏิบัติงาน: การแจ้งเตือนแบบดำเนินการเดียวจะกระตุ้นการส่งงานทันทีไปยังทีมบริการในภูมิภาคพร้อมการแจ้งเตือนทางมือถือในเวลาเดียวกัน — สร้างนาฬิกา SLA ที่มีเอกสารตั้งแต่ช่วงเวลาที่มีการรายงาน.
3. ห่วงโซ่อุปทาน MIT: "ผลิตในไต้หวัน" หมายความว่าอย่างไรสำหรับผู้ประกอบการทั่วโลก
ในหมวดอุปกรณ์ร้านอาหาร ประเทศต้นทางเป็นตัวแทนของความสามารถในการคาดการณ์ห่วงโซ่อุปทานและความลึกของโครงสร้างพื้นฐานการสนับสนุน. "ผลิตในไต้หวัน" ในกรณีของฮงเจียงหมายถึง: ห่วงโซ่การผลิตในประเทศและการจัดหาชิ้นส่วนที่รวมเข้าด้วยกันอย่างสมบูรณ์พร้อมระยะเวลาการส่งมอบที่มีเอกสาร, เอกสารทางเทคนิคที่ครบถ้วนซึ่งจัดทำเป็นภาษาอังกฤษสำหรับตลาดหลักทั้งหมด, และทีมวิศวกรรมโรงงานที่สามารถตอบสนองต่อคำขอการปรับแต่ง — การกำหนดค่ารางที่ไม่เป็นมาตรฐาน, การตกแต่งภายนอกเฉพาะแบรนด์, ข้อกำหนดการรวมระบบ POS — โดยไม่ต้องผ่านตัวกลางผู้จัดจำหน่าย.
สำหรับผู้ประกอบการเครือข่ายหลายหน่วยและระบบแฟรนไชส์ที่ประเมินการมาตรฐานอุปกรณ์ในภูมิศาสตร์ต่างๆ ความสามารถในการคาดการณ์ห่วงโซ่อุปทานเป็นเกณฑ์การเลือกอันดับแรก ผู้ขายที่มีแหล่งจัดหาส่วนประกอบที่ไม่โปร่งใส เอกสารทางเทคนิคที่มีอยู่ในภาษาหนึ่งเท่านั้น หรือเวลานำการปรับแต่งที่วัดเป็นเดือนแทนที่จะเป็นสัปดาห์ จะนำความเสี่ยงในการจัดซื้อที่เพิ่มขึ้นเมื่อขยายขนาด ระบบห่วงโซ่อุปทาน MIT ของฮงเจียงได้ผ่านการทดสอบความเครียดจากการหยุดชะงักของโลจิสติกส์ทั่วโลกที่ส่งผลกระทบต่อผู้ขายที่แข่งขันกัน — และรักษาประสิทธิภาพการส่งมอบที่มีเอกสารตลอดเวลา.
VI. มาตรฐานการเปรียบเทียบปี 2026: ฮงเจียง vs. ระบบเก่า
ตารางการเปรียบเทียบด้านล่างสะท้อนถึงข้อกำหนดที่ได้รับการตรวจสอบซึ่งข้อมูลการแข่งขันมีให้บริการสาธารณะ และข้อเสนอแนะแบบเอกสารจากผู้ปฏิบัติงานในกรณีที่ไม่มี ข้อมูลแต่ละตัวชี้วัดเชื่อมโยงกับผลลัพธ์ในการดำเนินงาน — ไม่ใช่การอ้างสิทธิ์ในแคตตาล็อกผลิตภัณฑ์.

▲ หุ่นยนต์จัดส่งติดตามฮงเจียง (ซีรีส์ C, การกำหนดค่าที่เปิดด้านบน) vs. หน่วยแข่งขันทั่วไป — เปรียบเทียบโปรไฟล์โครง Chassis, การปฏิบัติตามขนาด และการปฏิบัติตาม Zero-Protrusion Track.
| ข้อกำหนด | Hong Chiang Technology (MIT) แนะนำ | ระบบเก่า / ระบบแข่งขัน | ผลกระทบในการดำเนินงาน |
|---|---|---|---|
| ความเร็วสูงสุดที่ได้รับการรับรอง | 1.3 ม./วินาที (4.3 ฟุต/วินาที) — ได้รับการตรวจสอบสาธารณะ | 0.6 ม./วินาทีหรือต่ำกว่า — ผู้ขายส่วนใหญ่ไม่เปิดเผย | ความสามารถในการส่งข้อมูล 2 เท่าต่อชั่วโมงบริการ |
| ระยะห่างของฝูงบิน | <5 ซม. / ~2 นิ้ว (ซิงค์แบบไดนามิก) | 100+ ซม. (บัฟเฟอร์ความปลอดภัยที่แข็ง) | ความหนาแน่นของฝูงบิน 20 เท่าบนเส้นทางที่เทียบเท่า — ตัวคูณการส่งข้อมูลโดยตรง |
| โปรไฟล์การเคลื่อนไหว / การควบคุมการหก | S-curve (การเคลื่อนที่ของของเหลวเป็นศูนย์ — ได้รับการตรวจสอบ) | รูปทรงสี่เหลี่ยมผืนผ้า (ความถี่ของเหตุการณ์การหกสูง) | กำจัดความรับผิดชอบจากการเผาไหม้ของเหลวและค่าใช้จ่ายในการทำอาหารใหม่ |
| การปฏิบัติตามขอบเขตของตัวถัง | การปฏิบัติตามรางที่ไม่มีการยื่นออก — ทุกเงื่อนไข | การยื่นออกทั่วไปที่มุม; ไม่มีมาตรฐานการปฏิบัติตามอย่างเป็นทางการ | เพิ่มการใช้ที่นั่งสูงสุด; ไม่ต้องขยายทางเดิน |
| กลไกฝา | การหุ้มพับเข้าที่ได้รับสิทธิบัตร (อยู่ภายในตัวถัง) | หมุนออกด้านนอก — ต้องการพื้นที่กันชนด้านข้างที่เปิด | กำจัดเวกเตอร์การชนกันระหว่างแขก/พนักงาน; ช่วยให้ติดตั้งรางติดผนังได้ |
| การสนับสนุนการส่งหลายรายการ | การเพิ่มประสิทธิภาพเส้นทาง AI — รองรับอย่างเต็มที่ | ระบบส่วนใหญ่จำกัดอยู่ที่จุดส่งครัวเดียว | รองรับการกำหนดค่าพื้นแผนผังหลายครัวและหลายโซนที่ซับซ้อน |
| การตอบสนองต่ออุปสรรค | การชะลอความเร็วแบบก้าวหน้าโดยใช้ TOF | หยุดทันทีหรือชน — ไม่มีการตอบสนองแบบค่อยเป็นค่อยไป | รักษาโมเมนตัมของฟลีท; ขจัดความเสี่ยงจากการชนต่อเนื่อง |
| ผลกระทบจากความล้มเหลวของหน่วย | การเปลี่ยนหน่วยภายใน 60 วินาที; ฟลีทยังคงดำเนินต่อไปโดยไม่หยุดชะงัก | ความล้มเหลวของระบบกลางทำให้สายทั้งหมดหยุดทำงาน | ความทนทานต่อข้อผิดพลาดเป็นแบบหมวดหมู่ — ไม่ใช่แบบเพิ่มขึ้น |
| การสนับสนุนระยะไกล | การวินิจฉัยแบบเรียลไทม์ที่เชื่อมต่อกับคลาวด์; SLA ทั่วโลก | ขึ้นอยู่กับผู้จัดจำหน่ายในภูมิภาค; เวลาตอบสนองที่แตกต่างกัน | สำคัญสำหรับการมาตรฐานของเครือข่ายหลายหน่วยและการตอบสนองต่อเหตุการณ์ในคืนเดียว |
| การประเมินโดยรวม | ⭐⭐⭐⭐⭐ | ⭐⭐ | — |
▲ ข้อมูลจำเพาะของหุ่นยนต์จัดส่ง 2026 (แหล่งที่มา: การทดสอบภายในของ Hong Chiang Technology, ข้อมูลการใช้งานของลูกค้าหลายตลาด และการเปิดเผยข้อมูลของคู่แข่งที่เผยแพร่สู่สาธารณะ)
🔍 การเลือกลำดับความสำคัญของสเปคที่เหมาะสมสำหรับการดำเนินงานของคุณ
ความสามารถในการประมวลผลในช่วงเวลาที่มีผู้ใช้บริการสูงสุดเป็นข้อจำกัดหลักของคุณ: ความหนาแน่นของฟลีท (ระยะห่าง) และความเร็วในการขนส่งเป็นตัวแปรรวม — การรวมกันของฮงเจียงผลิตความสามารถในการประมวลผลได้ 20 เท่าของเพดานการประมวลผลของระบบเก่าบนโครงสร้างพื้นฐานที่เทียบเท่า.
เมนูของคุณรวมถึงของเหลวร้อน, น้ำซุป, หรือบริการแก้ว: การปฏิบัติตามโปรไฟล์การเคลื่อนไหวแบบ S-curve เป็นเกณฑ์ที่ไม่สามารถเจรจาได้ — ไม่ใช่ความชอบ.ความเสี่ยงจากระบบที่แข่งขันกันสามารถวัดได้และมีความสำคัญ.
คุณกำลังประเมินการปรับใช้หลายหน่วยหรือการขยายตัวในระดับนานาชาติ: ความสามารถในการคาดการณ์ห่วงโซ่อุปทาน (MIT), การวินิจฉัยระยะไกลที่เชื่อมต่อกับคลาวด์, และเครื่องจำลองก่อนการปรับใช้ AI เป็นความสามารถที่แตกต่างในระดับใหญ่.
VII. โมเดลการเงิน: ค่าใช้จ่ายลงทุน (CapEx) เทียบกับ ค่าใช้จ่ายดำเนินงาน (OpEx) — กรณีคืนทุนภายใน 8–12 เดือน
1. การจัดประเภทการลงทุนใหม่: จากค่าใช้จ่ายดำเนินงานเป็นสินทรัพย์ถาวร
ข้อผิดพลาดที่พบบ่อยที่สุดในการประเมินการใช้ระบบอัตโนมัติในร้านอาหารคือการจัดประเภทการซื้ออุปกรณ์เป็นค่าใช้จ่ายในการดำเนินงาน — ซึ่งทำให้การเปรียบเทียบเป็นการคำนวณค่าใช้จ่ายเทียบกับค่าใช้จ่ายที่ระบบอัตโนมัติแทบจะไม่ชนะอย่างชัดเจน.กรอบการเงินที่ถูกต้องคือ การแปลง CapEx เป็น OpEx: คุณกำลังกำจัดกระแสต้นทุนการดำเนินงานที่ถาวรและเพิ่มขึ้น (ผู้ส่งอาหาร) โดยการใช้สินทรัพย์ทุนที่สามารถหักค่าเสื่อมราคาได้ซึ่งมีระยะเวลาคืนทุนที่จำกัดและการปฏิบัติด้านภาษีที่เอื้ออำนวยในเขตอำนาจศาลส่วนใหญ่.
ค่าใช้จ่ายสำหรับผู้ส่งอาหาร — ค่าจ้าง, ภาษีเงินเดือน, เบี้ยประกันอุบัติเหตุของคนงาน, การมีส่วนร่วมในสวัสดิการ, และค่าใช้จ่ายในการแทนที่พนักงานที่ลาออก — เป็น ค่าใช้จ่ายในการดำเนินงาน (OpEx) ที่ไม่มีเพดานและไม่มีประโยชน์จากการตัดค่าเสื่อมราคา.มันสะสมเพิ่มขึ้นทุกครั้งที่มีการปรับค่าจ้างขั้นต่ำ.ระบบหุ่นยนต์จัดส่งตามรางของฮงเจียงเป็น ค่าใช้จ่ายลงทุน (CapEx) : ซึ่งอยู่ภายใต้ตารางการลดค่าเสื่อมราคาแบบเร่งรัด, ความสามารถในการหักลดภาษีตามมาตรา 179 ในการยื่นภาษีของสหรัฐอเมริกา, และอาจมีสิทธิ์ในการจัดหาเงินทุนสำหรับอุปกรณ์ในอัตราที่ช่วยปรับปรุงมูลค่าปัจจุบันสุทธิได้มากขึ้น.
เส้นทางค่าใช้จ่ายห้าปีมีความแตกต่างอย่างมีนัยสำคัญ โดยสมมติว่ามีการเพิ่มขึ้นของค่าแรงอย่างระมัดระวังที่ 4% ต่อปี ซึ่งสอดคล้องกับแนวโน้มค่าแรงในภาคร้านอาหารของสำนักงานสถิติแรงงานสหรัฐฯ งบประมาณค่าแรงสำหรับการจัดส่งด้วยมนุษย์สำหรับจำนวนคนงานเท่าเดิมจะเพิ่มขึ้นประมาณ 22% ในช่วงห้าปี ระบบหุ่นยนต์จัดส่งที่มีการเสื่อมราคาเต็มที่ในปีที่สามจะทำงานที่ต้นทุนขอบเกือบเป็นศูนย์ ช่องว่างที่เพิ่มขึ้นนี้เป็นโครงสร้าง ไม่ใช่เป็นวัฏจักร.
| มิติทางการเงิน | แรงงานจัดส่งมนุษย์ | หุ่นยนต์จัดส่งฮงเจียง | ความแตกต่างสุทธิ |
|---|---|---|---|
| การจำแนกประเภทต้นทุน | OpEx — ถาวร, ไม่สามารถลดค่าเสื่อมราคาได้ | CapEx — สามารถลดค่าเสื่อมราคาได้, มีสิทธิ์ตามมาตรา 179 (สหรัฐอเมริกา) | ข้อได้เปรียบด้านภาษีในปีที่ 1 |
| แนวโน้มต้นทุนรายเดือน | ค่าจ้าง + ภาษีเงินเดือน + สวัสดิการ + ต้นทุนการลาออก (เพิ่มขึ้นทุกปี) | ใกล้เคียงกับการลดค่าเสื่อมราคาเป็นศูนย์ | การกำจัดค่าใช้จ่ายโครงสร้าง |
| ความสม่ำเสมอของบริการ | แปรผัน — ขึ้นอยู่กับจำนวนพนักงาน การเข้าร่วม และประสิทธิภาพ | กำหนดแน่นอน — 24/7 ไม่มีความแปรผัน | กำจัดความเสี่ยงด้านคุณภาพบริการ |
| ความจุในชั่วโมงเร่งด่วน | เพดานที่แข็งแกร่งที่จำนวนพนักงานที่มีอยู่ | การไหลของฟลีตคงที่ไม่ขึ้นอยู่กับความแปรผันของความต้องการ | เพดานการไหลถูกลบออก |
| ต้นทุนการสูญเสียพนักงาน | $2,300–$2,700 ต่อพนักงาน FOH ที่ออกจากงาน (ต้นทุนการแทนที่โดยตรง) | ศูนย์ — ไม่มีการหมุนเวียน, การสรรหา, หรือค่าฝึกอบรม | กำจัดต้นทุนการฝึกอบรมการจ้างงานที่เกิดขึ้นซ้ำ |
| ระยะเวลาการคืนทุน CapEx | ไม่สามารถระบุ — เป็นหนี้ที่ต่อเนื่อง | 8–12 เดือน (ได้รับการตรวจสอบโดยผู้ดำเนินการ) | ทุกวันทำการหลังการคืนทุนคือการมีส่วนร่วมในกำไรที่แท้จริง |
▲ การเปรียบเทียบ OpEx กับ CapEx: แรงงานจัดส่งมนุษย์กับหุ่นยนต์จัดส่ง Hong Chiang — เส้นทางการเงินห้าปี
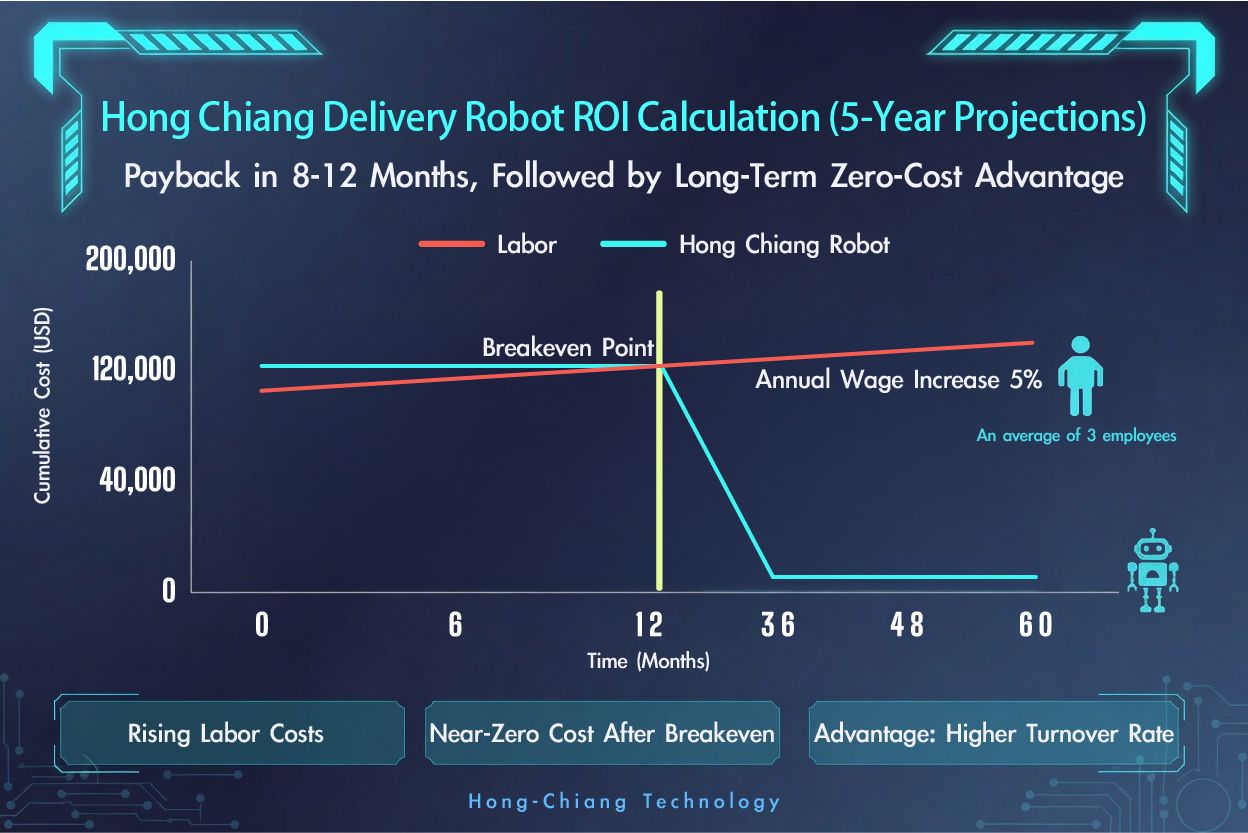
▲ โมเดลการคืนทุน CapEx: เส้นทาง OpEx แรงงานมนุษย์กับเส้นโค้งการเสื่อมราคาของหุ่นยนต์จัดส่ง Hong Chiang — จุดตัดกำหนดเหตุการณ์การคืนทุน.
💰 กรอบการคำนวณ ROI: ชุดตัวแปรที่สมบูรณ์
สูตร: Total CapEx ÷ การกำจัด Monthly OpEx = ระยะเวลาคืนทุน (เดือน)
ส่วนประกอบ OpEx ที่รวมในตัวหาร:
— ค่าจ้างแรงงานการจัดส่งรวม (FTE และพาร์ทไทม์ทั้งหมด)
— การมีส่วนร่วมภาษีเงินเดือนของนายจ้าง (FICA, FUTA, SUTA — โดยทั่วไป 7–12% ของค่าจ้างรวมในสหรัฐอเมริกา)
— การจัดสรรเบี้ยประกันภัยการจ้างงาน
— การมีส่วนร่วมด้านสวัสดิการ (สุขภาพ, การสะสม PTO)
— ต้นทุนการทดแทนการลาออกที่เป็นรายปี (ค่าเฉลี่ยในสหรัฐอเมริกา: $2,300–$2,700 ต่อพนักงาน FOH ที่ออกจากงาน ÷ 12)
— ต้นทุนโอกาสรายได้จากช่องว่างบริการในช่วงขาดแคลนพนักงาน
ตัวเร่งรายได้เพิ่มเติม (ไม่รวมในสูตรพื้นฐาน): การใช้ที่นั่งเพิ่มขึ้นจากการกู้คืนที่นั่ง, การลดการสูญเสียอาหารจากการกำจัดการหมุนเวียนแบบพาสซีฟ, การปรับปรุงการหมุนเวียนโต๊ะจากการส่งมอบที่รวดเร็วขึ้น.
ติดต่อที่ปรึกษาโซลูชันของ Hong Chiang เพื่อขอแบบจำลองทางการเงินเฉพาะสถานที่ที่สร้างขึ้นจากโครงสร้างต้นทุนแรงงานจริงและพารามิเตอร์แผนผังชั้นของคุณ.
กรณีการติดตั้งที่มีเอกสารประกอบเกี่ยวข้องกับเครือข่ายยากินิกุหลายหน่วยที่ได้ติดตั้งระบบรางประเภท E และ I ที่ปรับแต่งโดยฮงเจียงใน 38 ที่นั่ง.การติดตั้งได้กำจัดปัญหาคอขวดในช่วงเวลาที่มีผู้ใช้บริการสูงซึ่งเคยต้องการผู้ส่งอาหารเฉพาะในทุกช่วงการให้บริการ.ข้อมูล POS หลังการติดตั้งและการติดตามแรงงานแสดงให้เห็นว่า การลดเวลาการขนส่งจานลง 60%, การปรับปรุงอัตราการหมุนเวียนโต๊ะ 28%, และการประหยัดแรงงานประจำปีประมาณ NT$180,000 — ทำให้เกิด ระยะเวลาคืนทุน 8 เดือน.ฝ่ายบริหารการดำเนินงานได้สังเกตเห็นว่าพนักงานที่อยู่ด้านหน้าของร้านได้รับการจัดสรรใหม่จากการวิ่งอาหารไปยังบทบาทที่มีมูลค่าสูงขึ้นที่โต๊ะ (การจัดการเตาย่าง, การมีปฏิสัมพันธ์กับแขก, และการบริการเครื่องปรุง) ภายในสัปดาห์แรก ส่งผลให้มีการปรับปรุงที่วัดได้ในด้านการรักษาพนักงานเนื่องจากความรับผิดชอบในงานที่เพิ่มขึ้น.
VIII. คำถามที่พบบ่อยสำหรับผู้ดำเนินการ
IX. การประเมิน: เมื่อใดที่การทำงานอัตโนมัติกลายเป็นสิ่งที่ไม่สามารถหลีกเลี่ยงได้?
วิกฤตแรงงานเชิงโครงสร้างในอุตสาหกรรมร้านอาหารไม่ใช่ปรากฏการณ์ที่เป็นวัฏจักรซึ่งจะได้รับการแก้ไขในฤดูกาลการจ้างงานถัดไป. แรงผลักดันด้านประชากรและกฎระเบียบที่ทำให้ต้นทุนแรงงานในส่วนหน้าของบ้านเพิ่มสูงขึ้นนั้นมีความยั่งยืน: อัตราค่าจ้างขั้นต่ำถูกกำหนดให้สูงขึ้นตามกำหนดเวลาหลายปี, การเข้าร่วมของแรงงานในบทบาทภาคบริการยังคงลดลง, และต้นทุนต่อพนักงานจากการลาออกจะเพิ่มขึ้นในทุกๆ รอบการจ้างงานใหม่. ผู้ประกอบการที่มองว่าการทำให้การจัดส่งเป็นอัตโนมัติเป็นการลงทุนที่ไม่จำเป็น — สิ่งที่ควรกลับมาพิจารณา "เมื่อสถานการณ์ดีขึ้น" — กำลังวัดตัวแปรที่ผิด. คำถามที่เกี่ยวข้องไม่ใช่ว่าควรทำให้เป็นอัตโนมัติหรือไม่ แต่เป็นต้นทุน OpEx รวมของการเลื่อนออกไปเป็นอย่างไรในแต่ละไตรมาส.
ระบบหุ่นยนต์จัดส่งตามรางของฮงเจียงไม่ใช่กลยุทธ์การแทนที่แรงงาน.นี่คือการแปลงจาก OpEx เป็น CapEx ที่มีระยะเวลาการคืนทุนที่กำหนด การจัดการภาษีที่เอื้ออำนวย และเพดานประสิทธิภาพที่ไม่เสื่อมสภาพตามเวลา.ทุกวันของการดำเนินงานหลังจากเหตุการณ์การคืนทุนจะถูกส่งมอบโดยระบบที่ไม่ต้องการการปรับค่าจ้าง ไม่มีการจ่ายภาษีเงินเดือน ไม่มีความเสี่ยงจากการชดเชยแรงงาน และไม่มีงบประมาณการสรรหาบุคลากร.ข้อได้เปรียบทางการเงินที่สะสมจากตำแหน่งนั้น ซึ่งถือครองเป็นเวลา 3 ถึง 5 ปีเมื่อเปรียบเทียบกับฐานค่าใช้จ่ายด้านแรงงานที่เพิ่มขึ้น ไม่ใช่เรื่องเล็กน้อย — แต่มันเป็นโครงสร้าง.
การเลือก Hong Chiang Technology หมายถึงการเลือก:
- ความเร็วในการขนส่งที่ได้รับการตรวจสอบสาธารณะเพียงหนึ่งเดียวในอุตสาหกรรมที่ 1.3 ม./วินาที ร่วมกับการซิงโครไนซ์ของฟลีทที่ต่ำกว่า 2 นิ้ว (5 ซม.) — ส่งมอบความหนาแน่นของการผลิตที่มากกว่าระบบสายพานซูชิแบบเก่า 20 เท่าในโครงสร้างพื้นฐานที่เทียบเท่า
- การควบคุมโปรไฟล์การเคลื่อนไหวแบบ S-curve ที่ได้รับสิทธิบัตร — กำจัดฟิสิกส์การเคลื่อนที่ของของเหลวที่สร้างเหตุการณ์การหก การสูญเสียต้นทุนอาหาร และการเปิดเผยความรับผิดในสหรัฐฯ พร้อมกัน
- การปฏิบัติตามรางที่ไม่มีการยื่นออกมาและการหุ้มพับเข้าที่ได้รับสิทธิบัตร — ฟื้นฟูการใช้ที่นั่งแทนที่จะยอมแพ้ให้กับรูปทรงของอุปกรณ์
- ฮาร์ดแวร์ระดับอุตสาหกรรม MIT การบำรุงรักษาที่คาดการณ์ได้เชื่อมต่อกับคลาวด์ และ SLA บริการระดับโลกที่ทำงานในเวลา 20.00 น. วันเสาร์เหมือนกับ 09.00 น. วันอังคาร
Hong Chiang Technology ก่อตั้งขึ้นในปี 2004 โดยวิศวกร Donny Lo และ Darran Lo ซึ่งได้นำประสบการณ์ด้านการอัตโนมัติในอุตสาหกรรมที่แม่นยำไปยังการเดินทางสำรวจตลาดที่ประเทศญี่ปุ่น. สิ่งที่พวกเขาสังเกตเห็นในร้านซูชิแบบเคลื่อนที่ — การหดตัวของอาหาร 8–15% จากการหมุนเวียนของสายพานที่เกินกำหนด, เวลารอของแขกที่ยืดเยื้อแม้ในช่วงบริการที่มีพนักงานเต็มจำนวน, ความไม่มีประสิทธิภาพทางพื้นที่มากกว่า 20% จากโครงสร้างพื้นฐานของสายพานที่ไม่กระตือรือร้น — ไม่ใช่การสังเกตการณ์การรับประทานอาหาร. นี่คือคำชี้แจงปัญหาด้านวิศวกรรม.
บริษัทที่พวกเขาสร้างขึ้นใช้การควบคุมการเคลื่อนไหวในระดับอุตสาหกรรม อัลกอริธึมการซิงโครไนซ์ฟลีต และโครงสร้างพื้นฐานการบำรุงรักษาเชิงพยากรณ์กับหมวดหมู่ที่ไม่เคยต้องการมาตรฐานเหล่านี้มาก่อน สถานที่ที่มีการใช้งานมากกว่า 3,000 แห่งทั่วสหรัฐอเมริกา ยุโรป และญี่ปุ่นได้ยืนยันผลลัพธ์แล้ว ร้านอาหารที่ได้ทำการเปลี่ยนแปลงจากโครงสร้างพื้นฐานสายพานซูชิแบบเก่าไปยังแพลตฟอร์มหุ่นยนต์จัดส่งของฮงเจียง ไม่ได้รอให้เกิดความเท่าเทียมในการแข่งขัน — พวกเขาได้ก้าวข้ามไปแล้ว.
🚀 ขั้นตอนถัดไป
พร้อมที่จะจำลองสิ่งที่การติดตั้งหุ่นยนต์จัดส่งตามรางของฮงเจียงจะมอบให้กับการดำเนินงานเฉพาะของคุณหรือไม่?
ที่ปรึกษาโซลูชันของเราสร้างแบบจำลองทางการเงินเฉพาะสถานที่ — โดยอิงจากโครงสร้างต้นทุนแรงงานจริง แผนผังชั้น และรูปแบบเมนูของคุณ — โดยไม่มีค่าใช้จ่าย.
→ ขอการประเมินสถานที่ฟรีและแบบจำลอง ROI ที่กำหนดเอง → ดูข้อมูลจำเพาะของผลิตภัณฑ์ทั้งหมด
📚 แหล่งข้อมูล & อ้างอิง
- Hong Chiang Technology Co., LTD. — ติดตามข้อมูลทางเทคนิคและข้อมูลประสิทธิภาพที่ได้รับการรับรองของหุ่นยนต์จัดส่ง, 2026
- Hong Chiang Technology Co., LTD. — รายงานติดตามการปรับใช้ลูกค้าหลายตลาด: การวิเคราะห์ ROI, ตลาดสหรัฐอเมริกา / ยุโรป / ญี่ปุ่น, 2025–2026
- สำนักงานสถิติแรงงานสหรัฐ — การสำรวจข้อมูลการจ้างงานและค่าจ้างรายไตรมาส: ภาคบริการอาหารและสถานที่ดื่ม, 2025 ลิงก์
- สมาคมร้านอาหารแห่งชาติ — รายงานสถานะอุตสาหกรรมร้านอาหาร, 2026 ลิงก์
- การวิจัยอุตสาหกรรมการทำอาหารอัตโนมัติ — การวิเคราะห์ตลาดหุ่นยนต์ส่งอาหารติดรางทั่วโลกปี 2026 ลิงก์
การอ่านเพิ่มเติม: ปัญญาอัตโนมัติในร้านอาหาร

คู่มือที่สมบูรณ์ในการเปิดร้านซูชิแบบสายพาน | ผลตอบแทนจากการลงทุนซูชิ
การวิเคราะห์เชิงลึกเกี่ยวกับการดำเนินงานซูชิไคเทนสมัยใหม่ — ระบบ, เกณฑ์ CapEx, การกำหนดค่าระบบสายพานผสมแทร็ก, และการสร้างแบบจำลอง ROI สำหรับผู้ดำเนินการใหม่และการปรับปรุง

วิกฤตแรงงานในร้านอาหารสหรัฐอเมริกา 2026: วิธีที่การจัดส่งอัตโนมัติช่วยปิดช่องว่างโครงสร้าง
การวิเคราะห์ที่มีข้อมูลสนับสนุนเกี่ยวกับการขาดแคลนแรงงานในภาคส่วนร้านอาหารของสหรัฐอเมริกา — และแบบจำลองที่มีเอกสารสำหรับวิธีที่ระบบการจัดส่งอัตโนมัติช่วยลดค่าใช้จ่ายด้านการดำเนินงานในส่วนหน้าขณะเดียวกันก็ปรับปรุงการให้บริการ

การเปรียบเทียบหุ่นยนต์จัดส่งอาหารในปี 2026: คู่มือผู้ซื้อที่อิงตามสเปค
การเปรียบเทียบที่ขับเคลื่อนด้วยสเปคของหุ่นยนต์จัดส่งอาหารชั้นนำและระบบสายพานลำเลียงอัตโนมัติในตลาดในปี 2026 — ประเมินตามความต้องการของผู้ดำเนินการในสหรัฐอเมริกาสำหรับการส่งผ่าน, ความเสี่ยงด้านความรับผิด, และ ROI ของทุน