
Guia de compra del tren de sushi (robot de lliurament de menjar) i cinta transportadora de sushi 2026
Automatització global de restaurants 2026: per què els robots de lliurament amb seguiment són el futur de la restauració
El 2026, la indústria global de restaurants s'enfronta a la triple pressió de la manca de mà d'obra, els lloguers alts i les demandes d'higiene — deixant les cintes transportadores de sushi tradicionals incapaces de mantenir el ritme. Aquest article proporciona una anàlisi en profunditat dels trens de sushi de Hong Chiang Technology (robot de lliurament de menjar): cinc avantatges tècnics principals que inclouen lliurament a màxima velocitat, prevenció de vessaments en forma de S, disseny de cos ultra prim, algoritme dinàmic de distància de seguiment i garantia de qualitat del MIT.
📌 Resum executiu
La indústria global de l'hospitalitat ja no està navegant un obstacle temporal de personal.Fins al 2026, ha entrat en un estat permanent de crisi laboral estructural — agreujat per una legislació agressiva sobre el salari mínim, l'acceleració de les pressions sobre els costos d'ocupació i l'augment de l'exposició a responsabilitats per un servei inconsistent.Dependre d'infraestructures passives i accionades per cintes com el llegat cinta transportadora de sushi ja no proporciona l'agilitat operativa necessària per protegir els marges.El sistema de robot de lliurament de seguiment de Hong Chiang Technology aborda aquestes pressions directament: una velocitat de trànsit màxima verificada de 1.3 m/s, sincronització de flota propietària a menys de 2 polzades (5 cm) de distància de seguiment, patentat Perfil de Moviment en S per prevenir vessaments que eliminen lesions per escaldament, i Enginyerat a Taiwan fabricació de grau industrial — desplegat en més de 3,000 ubicacions de restaurants als EUA, Europa i Japó.Els operadors informen d'un retorn consistent de retorn de la inversió en 8–12 mesos, amb aplicacions que abasten sushi kaiten, hot pot, yakiniku i qualsevol entorn de servei de ruta fixa que afronti una sequera estructural de mà d'obra.
Taula de continguts
- I. El cas estructural contra les cintes transportadores de sushi tradicionals el 2026
- II. Avantatge de rendiment 1: Velocitat de trànsit verificada i control de densitat de flota
- III. Avantatge de rendiment 2: Perfil de moviment en S — Eliminant responsabilitats de vessament a alta velocitat
- IV. Avantatge de rendiment 3: Compliment de pista sense protrusió — Maximitzant l'ús dels seients
- V. Avantatge de rendiment 4: Fiabilitat de grau industrial i infraestructura de suport global
- VI. Referència de especificacions 2026: Hong Chiang vs. Sistemes tradicionals
- VII. Model financer: CapEx vs. OpEx — El cas de recuperació de 8 a 12 mesos
- VIII. Preguntes freqüents per a operadors
- IX. Avaluació: Quan esdevé l'automatització no opcional?
I. El cas estructural contra les cintes transportadores de sushi tradicionals el 2026
La cinta transportadora de sushi — o sistema kaiten sushi — va ser una autèntica innovació operativa quan va aparèixer al Japó als anys 50 i es va escalar comercialment durant els anys 90. La circulació passiva de la cinta va resoldre un problema real: va reduir la mà d'obra necessària per entregar plats a taules individuals mentre creava un efecte de màrqueting visual atractiu. Durant tres dècades, el format va funcionar.
L'entorn operatiu de 2026 ha invalidat aquestes suposicions.La cinta transportadora de sushi és una infraestructura de punt únic de fallada: un motor central impulsa una cinta contínua a través de tota la sala de menjador.Quan la cinta s'atura — a causa d'una fallada del motor, una obstrucció o un desgast mecànic — tot el sistema de lliurament es desconnecta simultàniament.No hi ha recuperació parcial, ni aïllament de fallades, ni solució alternativa.Durant un servei de sopar divendres a plena capacitat, aquesta fallada no és un inconvenient;és un esdeveniment de ingressos complet.
⚠️ Tres responsabilitats estructurals dels sistemes de cinta transportadora de sushi llegats
① Fallida en cadena d'un únic punt: Una fallada del motor o de la corretja fa que tota la línia de servei es quedi fora de línia sense opció de recuperació parcial — el risc durant les hores punta es concentra inacceptablement en un únic component mecànic.
② Compensació entre velocitat i responsabilitat: Augmentar la velocitat de la corretja genera esdeveniments de vessament, que comporten un impacte directe en el cost dels aliments i, en els mercats dels EUA i la UE, una possible exposició a responsabilitats per caigudes o cremades líquides.Els operadors es veuen obligats a limitar la velocitat per sota dels llindars eficients.
③ Elasticitat de Capacitat Zero: La longitud de la cinta és fixa a la instal·lació.No hi ha cap mecanisme per augmentar el rendiment durant pics de volum inesperats, i el disseny de les places està permanentment limitat pel camí físic de la cinta.
Aquestes limitacions s'estan acumulant el 2026 en un moment exactament equivocat.Els operadors de restaurants dels EUA s'enfronten a un salari mínim federal que ha augmentat substancialment, mentre que els mandats a nivell estatal a Califòrnia, Nova York i Washington han elevat encara més els costos laborals efectius a la sala.La rotació estructural en el segment de restauració de servei complet és del 70-80% anualment — cada empleat que marxa del servei al client comporta un cost de substitució estimat de $2,300 quan es tenen en compte el reclutament, la integració i l'augment de productivitat.Els operadors que gestionen sistemes de cinta transportadora de sushi antics absorbeixen tota aquesta càrrega d'OpEx sense cap benefici d'amortització, sense tractament fiscal com a actiu de capital i sense millora del sostre de rendiment any rere any.

▲ Canvi arquitectònic: Hong Chiang Technology robot de lliurament de pistes (potència distribuïda) vs. cinta transportadora de sushi tradicional (motor centralitzat). La diferència en la tolerància a fallades no és incremental — és categòrica.
La resposta d'enginyeria de Hong Chiang Technology és estructural: reubicar la potència motriu del cinturó a cada robot individual. La pista es converteix en un camí de navegació, no en la font d'energia. Les unitats individuals fallen de manera independent i es substitueixen en menys d'un minut sense interrompre el servei de la flota. El que sembla una actualització de producte és en realitat una reclassificació arquitectònica: d'una infraestructura fràgil i centralitzada a una flota resilient i distribuïda.
El model de desplegament comercial de Hong Chiang es va construir originalment al voltant d'actualitzacions no disruptives: els operadors podien adaptar la infraestructura ferroviària existent sense tancar per a la construcció. A mesura que es va acumular el historial operatiu de la flota a través dels mercats, el model va madurar. Avui, Hong Chiang actua com a soci de transformació complet per a cadenes de múltiples unitats — substituint completament la infraestructura de cintes transportadores de sushi i integrant el sistema de robots de lliurament de pistes amb les plataformes existents de TPV, pantalles de cuina i gestió d'inventari. El motor de simulació d'IA propietari de l'empresa permet als operadors modelar el rendiment de lliurament, les configuracions de seients i els escenaris de cobertura en hores punta abans que comenci la instal·lació — una capacitat que no està disponible per cap venedor competidor en la categoria.
II. Avantatge de rendiment 1: Velocitat de trànsit verificada i control de densitat de flota
1. 1.3 m/s: L'única especificació de velocitat verificada públicament en la categoria
La velocitat de trànsit en sistemes de servei d'aliments automatitzats no és una variable de màrqueting — és el principal determinant del rendiment de lliurament, i el rendiment controla directament l'eficiència de rotació de taules.Els robots de lliurament de seguiment de Hong Chiang Technology operen a una velocitat màxima certificada de 1,3 metres per segon (aproximadament 4,3 ft/s) .Aquesta és l'única especificació de velocitat divulgada públicament i verificable de manera independent en la categoria d'automatització de restaurants.
Per posar aquesta velocitat en perspectiva: En un restaurant de sushi kaiten de mida mitjana típic amb 20 metres de pista, un robot Hong Chiang pot viatjar des de la cuina fins a la taula més llunyana en menys de 13 segons.
En comparació, els sistemes de cinta transportadora de sushi tradicionals estan limitats a una velocitat màxima de només 0,1–0,5 m/s — una velocitat que sovint té dificultats per satisfer les demandes d'un servei d'alt volum i un ràpid canvi de taula. Aquesta diferència de rendiment és significativa. Durant una finestra de servei de màxim 90 minuts, el servei de lliurament més ràpid de Hong Chiang pot gairebé duplicar el nombre de coberts servits en comparació amb els sistemes tradicionals de cinta transportadora.
La majoria dels sistemes de robots de lliurament d'aliments competidors tampoc han pogut aconseguir velocitats significativament més altes, principalment perquè encara no han superat el repte de prevenir vessaments i desplaçaments de líquids a velocitats més altes.
Hi ha una dimensió de cost secundària en el model de cinta transportadora de sushi llegat que els operadors sovint subestimen: la pèrdua d'aliments.El format de circulació per cinta depèn que els plats es mantinguin visualment accessibles i atractius per als comensals que passen.Els protocols de seguretat alimentària — incloent el Sistema de Frescor del Sushi de Hong Chiang — requereixen que els plats siguin retirats de la circulació un cop s'excedeixen els llindars de temps d'espera.En operacions d'alt volum, això genera una reducció verificada del cost dels aliments de 8% a 15% — un impacte directe en el COGS que l'entrega per seguiment a demanda elimina completament enviant plats a comandes confirmades en lloc de circular especulativament.
▲ Robot de lliurament Hong Chiang: velocitat de trànsit certificada de 1,3 m/s — la única xifra de rendiment verificada públicament en la categoria d'automatització de restaurants.
2. Sincronització de flota de menys de 2 polzades: 20 vegades la utilització de la pista dels sistemes competidors.
La velocitat màxima produeix rendiment només quan la densitat de la flota manté el ritme.propietat de Hong Chiang Algoritme de control dinàmic de distància de seguiment permet que diversos robots de lliurament de pistes mantinguin una formació sincronitzada a intervals de menys 5 cm (aproximadament 2 polzades) — sense esdeveniments de contacte.
Els sistemes competidors — on es divulga dades d'enginyeria — solen requerir distàncies mínimes de seguiment de 100 cm o més per prevenir col·lisions en cadena.En contrast, el propietari de Hong Chiang Algorisme de Control de Distància de Seguiment Dinàmic permet una operació segura i sincronitzada a intervals inferiors a 2 polzades (5 cm).Combinat amb el nostre avançat sistema de gestió de flotes d'IA, això permet als operadors desplegar flotes significativament més grans (més de 100 unitats) sobre la mateixa infraestructura de pistes sense risc de congestió o col·lisió — proporcionant una millora substancial en l'ús de la pista i el rendiment general de lliurament en comparació amb els sistemes llegats.
L'algorisme aconsegueix això mitjançant la detecció contínua en temps real de la posició i la velocitat de cada unitat, amb perfils d'acceleració individuals ajustats dinàmicament per mantenir la integritat de la formació a velocitat. La detecció d'obstacles TOF (Time-of-Flight) proporciona una capa de seguretat secundària: qualsevol objecte estrany a la pista activa una desacceleració progressiva a les unitats afectades — no una parada brusca — preservant el moment de la flota mentre neutralitza l'esdeveniment de col·lisió.
📊 Densitat de la flota: Les matemàtiques d'utilització
Sistemes competidors (distància de seguiment de més de 100 cm): pista de 20 metres → 10~11 unitats desplegament màxim concurrent
Hong Chiang Technology (distància de seguiment de menys de 2 polzades): pista de 20 metres → 55~65 unitats desplegament màxim concurrent
La taxa d'utilització de la pista és el multiplicador ocult del ROI de maquinari.Una major densitat significa un major rendiment del mateix espai de capital — sense haver de col·locar un sol peu addicional de via.
III. Avantatge de rendiment 2: Perfil de moviment S-Curve — Eliminant responsabilitats de vessament a alta velocitat
1. Per què els vessaments són una exposició legal, no només una molèstia operativa
Cada operador que ha avaluat la entrega automatitzada a gran escala arriba al mateix punt d'inflexió: el sistema es mou ràpidament, però es mou de manera segura amb líquids calents?En les operacions domèstiques dels EUA, aquesta pregunta té una dimensió que va més enllà de la presentació dels aliments.Un bol de brou de ramen vessat — sobre un convidat, sobre un cambrer, o sobre una superfície de pas compartida — no és un error de servei.Segons els estàndards de responsabilitat civil dels EUA, és un potencial esdeveniment de responsabilitat per lesions personals: risc de caigudes en superfícies humides, reclamacions per cremades líquides de convidats escaldats i exposició a OSHA per al personal a la zona de servei.
Els robots de lliurament d'aliments llegats — i els sistemes de cintes transportadores de sushi que van ser dissenyats per substituir-los — utilitzen un perfil de velocitat trapezoïdal: acceleració màxima fins a la velocitat d'operació, seguida d'una desacceleració brusca per aturar-se.Aquest perfil de moviment és mecànicament eficient per a càrrega seca.Aplicat a líquids en contenidors oberts, genera un pic de força inercial previsible tant en esdeveniments d'acceleració com de frenada.La física no és ambigua: el desplaçament del líquid és proporcional al cop (taxa de canvi de l'acceleració), i els perfils trapezoïdals produeixen el màxim cop precisament en els moments en què un convidat és més probable que estigui agafant la seva comanda.

▲ Perfil de moviment en corba S (Hong Chiang) vs. corba de velocitat trapezoïdal (sistemes llegats): l'eliminació del cop en els esdeveniments d'acceleració i frenada elimina la condició física que produeix incidents de vessament.
2. Perfil de moviment en corba S: Control de moviment industrial aplicat al servei d'aliments
La solució de Hong Chiang és l'aplicació de control de perfil de moviment de corba en S — el protocol estàndard de gestió de velocitat en automatització industrial de precisió, mecanitzat CNC i ferrocarril d'alta velocitat — al context del lliurament en restaurants.El perfil en forma de S descompon les fases d'acceleració i desacceleració en múltiples segments progressius, produint una transició de velocitat suau i contínua amb un cop gairebé nul en tot moment.
L'analogia experiencial és precisa: un tren Shinkansen o Maglev ben dissenyat accelera a través de diferencials de velocitat equivalents sense produir cap força inercial perceptible als passatgers o les seves begudes. Hong Chiang aplica principis idèntics de control de moviment a l'escala de la pista del restaurant. El resultat verificat: cicles de trànsit complets a 1,3 m/s sense esdeveniments de desplaçament de líquids en proves controlades i en més de 3.000 desplegaments comercials actius.
El punt de prova més exigent en el portafoli de desplegament de Hong Chiang és un local de bar als Estats Units on el sistema ofereix còctels en copes altes — una categoria on fins i tot la vibració submil·limètrica és desqualificant a nivell operatiu. Hong Chiang és el únic venedor en la categoria d'automatització de restaurants que ha completat un desplegament verificat i sostingut en aquest entorn. El resultat valida tant l'enginyeria del moviment en corba S com la integritat estructural del maquinari sota els llindars de sensibilitat a les vibracions del servei de vaixella de vidre fi.

▲ Desplegament verificat: robots de lliurament Hong Chiang transportant còctels en gots alts en un bar dels EUA — el punt de prova de servei líquid més exigent en la categoria d'automatització de restaurants.
💡 Quantificació de responsabilitat: Què costa realment un vessament a un operador dels EUA
Costos directes: Reproducció del plat (cost alimentari), neteja de la pista (temps de treball), interrupció del servei durant la neteja.
Costos indirectes: Insatisfacció dels convidats, abandonament de la taula abans del cicle de segona comanda, risc de seguretat alimentària per contaminació creuada de plats adjacents.
Exposició legal: Reclamacions de responsabilitat per caigudes i relliscades, reclamacions per lesions personals per cremades líquides — ambdues categories presenten xifres mitjanes de liquidació als EUA en el rang de $15,000–$75,000 abans d'honoraris legals.Un sol incident pot superar el cost operatiu anual de tota la flota de robots.
El perfil de moviment en S no és una característica de confort.És una especificació de gestió de riscos.
IV. Avantatge de Rendiment 3: Compliment de Pista Sense Protrusió — Maximitzant l'Utilització dels Seients
Cada peu quadrat del teu pla de menjador ha de generar ingressos. Als mercats urbans — Nova York, Los Angeles, Chicago, Londres, Tòquio — els costos d'ocupació per peu quadrat han arribat a nivells on la diferència entre 28 i 32 cobertes en un pla de planta determinat és la diferència entre un model econòmic viable i un de no viable. Una solució d'automatització que requereix que els operadors ampliïn els passadissos de servei, reubiquin taules o sacrifiquin seients per a convidats per tal d'acollir xassís d'equips voluminosos i components mecànics que s'obren cap a fora no és un guany d'eficiència. És un comerç.
1. Compliment de la pista de zero protrusió: geometria com a un fossat competitiu
L'equip d'enginyeria de Hong Chiang va establir una restricció de disseny no negociable durant el desenvolupament: el xassís del robot no ha de superar mai el límit de la pista en cap moment durant el trànsit.Aquesta restricció s'aplica a seccions lineals, a través de corbes i — de manera crítica — a través de transicions d'angle on la geometria centrífuga faria que la majoria dels dissenys de xassís sobresurten.
La implicació pràctica per al disseny de plànols de planta és significativa. La distància de seguretat requerida entre el perímetre de la pista i els seients o elements adjacents es pot reduir a un mínim absolut. Les taules es poden col·locar més a prop de la pista del que qualsevol sistema competidor permet, sense introduir el risc de col·lisió entre el robot en moviment i els convidats estacionaris, la vaixella o els mobles. En un format urbà compacte — l'entorn de lloguer elevat on el ROI de l'automatització és més crític — aquest avantatge geomètric pot recuperar de dues a quatre cobertes per instal·lació sense alterar la petjada física.

▲ Compliment de la pista de zero protrusió: el xassís del robot i el mecanisme de la tapa es mantenen dins del límit de la pista en totes les condicions de trànsit — seccions rectes, corbes i cantonades. No es sacrifica cap marge de separació per la geometria de l'equip.
2. Enclosure amb plegat cap a dins patentat: eliminant el vector de col·lisió ocult.
Els robots de lliurament d'aliments estàndard utilitzen mecanismes de tapa que giren cap a fora o que s'aixequen i que s'estenen més enllà del xassís del vehicle quan estan oberts. Això crea un vector de col·lisió previsible: un client que arriba a la seva comanda, un cambrer que passa pel passadís adjacent, un got o un recipient de condiments veí — qualsevol d'aquests objectes pot ser contactat per un mecanisme de tapa que no té consciència del seu entorn durant el cicle obert.
L'Enclosure Plegable Cap a Dins Patentat de Hong Chiang elimina completament aquest vector.El viatge mecànic complet d'obertura i tancament de la tapa es manté dins dels límits del xassís del robot en tot moment, ja sigui que la unitat estigui aturada per recollir comandes o es mogui a través de la flota a velocitat de trànsit.Les dimensions externes màximes del robot són constants i predecibles en tots els estats d'operació.
Hi ha una implicació d'enginyeria secundària que val la pena tenir en compte per als operadors dels EUA que avaluen instal·lacions específiques del lloc: els sistemes de tapa que s'obren cap a fora no es poden muntar a la pista a nivell amb una paret o estructura fixa, perquè l'arc de la tapa requereix espai lliure pel costat obert. Això imposa efectivament un requisit de amplada mínima del passadís a ambdós costats de qualsevol instal·lació de pista competidora. El disseny de plegat interior de Hong Chiang no té aquesta restricció: la pista es pot instal·lar contra una paret, una divisòria de cabina o una columna estructural a qualsevol costat sense sacrificar la funció de la tapa ni crear un perill de servei.
🏠 Matemàtica d'Utilització de Seients: El Valor de Recaptació de Cobertes Recuperades
En un dinar casual als EUA amb un compte mitjà de $35–$55 per cobert i un gir de taula de 2.5× per servei, cada taula addicional de dues places recuperada de l'optimització del passadís genera aproximadament $175–$275 en ingressos incrementals per període de servei.
En un any operatiu de 250 dies amb dos períodes de servei diaris, dues cobertes recuperades contribueixen $87,500–$137,500 en ingressos anualitzats de línia superior — sense cap superfície addicional.
(Les xifres són il·lustratives; els resultats reals depenen del format, del compte mitjà i de la taxa de rotació.)
V. Avantatge de Rendiment 4: Fiabilitat de Grau Industrial i Infraestructura de Suport Global
1. Especificació del Component: Fallada de Grau de Consumidor en un Entorn Operatiu Industrial
L'equipament de restaurant opera en un dels entorns mecànicament i tèrmicament més hostils de qualsevol aplicació comercial: exposició sostinguda a alta humitat per vapor de cuina, cicles tèrmics repetits durant els períodes de servei diari, acumulació de greix i partícules en components mecànics, i funcionament continu durant dues finestres de màxim volum amb intervals de manteniment mínims.Els modes de fallada que observem més freqüentment en les implementacions de robots de lliurament d'aliments competidors es remunten directament a una única causa arrel: especificació de components de consum aplicades a un cicle de treball de grau industrial.
Sobrecalentament del motor sota càrrega sostinguda, fallades de la placa de control provocades per la humitat, i desplaçament de l'encoder per expansió tèrmica — aquestes no són fallades aleatòries. Són resultats predecibles de especificar components valorats per a un ús de consum intermitent en un entorn que exigeix un rendiment industrial continu. Els robots de lliurament de Hong Chiang estan especificats des del nivell de component per a un deure comercial 24/7, amb gestió tèrmica, protecció contra la intrusió i toleràncies mecàniques calibrades per a l'entorn operatiu del restaurant — no per al laboratori de proves de productes.

▲ Especificació de components de grau industrial: Els robots de lliurament per pista de Hong Chiang estan classificats per a un deure comercial continu — no per a cicles de consum intermitents — en entorns de restaurant amb alta humitat i alta temperatura.
2. Infraestructura de Manteniment Predictiu: Eliminació del Temps d'Atur No Planificat
La fiabilitat del maquinari és un requisit previ;l'evitació de fallades predictiva és l'estàndard operatiu que proporciona Hong Chiang.El sistema monitorització del cicle de vida dels components en temps real fa un seguiment de la distància de viatge acumulada, l'exposició tèrmica i el recompte de cicles mecànics per a cada unitat de la flota desplegada.Quan qualsevol component s'acosta al seu llindar de substitució actuarial, el sistema genera una alerta de manteniment proactiu — abans que es produeixi un esdeveniment de fallada.
Per a les anomalies a la capa de programari, la plataforma de diagnòstic remot connectada al núvol de Hong Chiang permet a l'equip d'enginyeria amb seu a Taiwan identificar, diagnosticar i enviar protocols de resolució a les unitats desplegades en minuts després de la detecció de l'anomalia, sense requerir la visita d'un tècnic al lloc. Per als operadors dels EUA i d'Europa, això significa que el temps de resposta efectiu del suport per a la majoria d'incidents es mesura en minuts, no en dies laborables. Quan es requereix una intervenció de maquinari in situ, la xarxa de socis de servei regional de Hong Chiang manté un inventari de peces preposicionades escalat a les dades de demanda actuarial — no a l'atzar — a través dels principals mercats d'Amèrica del Nord, Europa i Àsia-Pacífic.
La notificació d'incidents orientada al client està integrada al panell de control de l'operador: una alerta d'acció única activa l'enviament immediat de tasques a l'equip de servei regional amb notificació mòbil simultània — establint un rellotge SLA documentat des del moment de la notificació.
3. Cadena de subministrament MIT: Què significa "Enginyat a Taiwan" per als operadors globals
En la categoria d'equipament de restaurant, el país d'origen és un proxy per a la predictibilitat de la cadena de subministrament i la profunditat de la infraestructura de suport. "Enginyat a Taiwan" en el cas de Hong Chiang representa: una cadena de subministrament i fabricació domèstica totalment integrada amb temps de lliurament documentats, documentació tècnica completa mantinguda en anglès per a tots els mercats principals, i un equip d'enginyeria de fàbrica que pot respondre a les sol·licituds de personalització — configuracions de pista no estàndard, acabats exteriors específics de marca, especificacions d'integració de POS — sense passar per un intermediari distribuïdor.
Per als operadors de cadenes de múltiples unitats i sistemes de franquícies que avaluen la standardització d'equips a través de geographies, la predictibilitat de la cadena de subministrament és un criteri de selecció de primer ordre. Un venedor que té un aprovisionament de components opac, que la seva documentació tècnica existeix només en un sol idioma, o que els seus temps de personalització es mesuren en mesos en lloc de setmanes, introdueix un risc de compra que es complica a gran escala. La cadena de subministrament de Hong Chiang ha estat sotmesa a proves d'estrès a través de les interrupcions logístiques globals que van afectar venedors competidors — i ha mantingut un rendiment de lliurament documentat durant tot el temps.
VI. Benchmark de especificacions 2026: Hong Chiang vs. Sistemes llegats
La següent taula de benchmark reflecteix especificacions verificades on les dades competidores són públicament disponibles, i comentaris documentats dels operadors on no ho són. Cada mètrica es relaciona amb un resultat operatiu — no amb una afirmació del catàleg de productes.

▲ Robot de lliurament de pista Hong Chiang (Sèrie C, configuració de sostre obert) vs. unitat competidora típica — comparació del perfil del xassís, compliment dimensional i compliment de pista Zero-Protrusion.
| Especificació | Hong Chiang Technology (MIT) Recomanat | Sistemes llegats / Competidors | Impacte operatiu |
|---|---|---|---|
| Velocitat màxima certificada | 1.3 m/s (4.3 ft/s) — verificat públicament | 0.6 m/s o inferior — la majoria dels venedors no ho revelen | 2× capacitat de rendiment per hora de servei |
| Distància de seguiment de la flota | <5 cm / ~2 polzades (sincronització dinàmica) | 100+ cm (buffer de seguretat dur) | 20× densitat de flota en pista equivalent — multiplicador de rendiment directe |
| Perfil de moviment / Control de vessaments | Corba S (desplaçament de líquid zero — verificat) | Trapezoidal (alta freqüència d'esdeveniments de vessament) | Elimina l'exposició a la responsabilitat per cremades de líquid i el cost de reedició d'aliments |
| Compliment de límits del xassís | Compliment de la pista de zero-protrusió — totes les condicions | Voladís comú a les cantonades; sense estàndard de compliment formal | Maximitza l'ús dels seients; no es requereix ampliació del passadís |
| Mecanisme de tapa | Tancament amb plegat cap a dins patentat (es manté dins del xassís) | Rotació cap a fora — requereix un buffer d'espai al costat obert | Elimina el vector de col·lisió entre convidats i personal; permet la instal·lació de pistes a nivell de paret |
| Suport de multi-despedida | Optimització de camins AI — totalment suportada | La majoria dels sistemes limitats a un únic punt de despesa de cuina | Admet configuracions de plànols de planta complexos amb múltiples cuines i múltiples zones |
| Resposta a obstacles | Desacceleració progressiva activada per TOF | Aturada brusca o col·lisió — sense resposta graduada | Momentum de la flota preservat; elimina el risc de cascada de col·lisions |
| Impacte de fallada de la unitat | Intercanvi de unitat en menys de 60 segons; la flota continua sense interrupcions | La fallada del sistema central desconnecta tota la línia | La tolerància a fallades és categòrica — no incremental |
| Suport remot | Diagnòstics en temps real connectats al núvol; SLA global | Dependent del distribuïdor regional; temps de resposta variable | Crític per a la standardització de cadenes de múltiples unitats i resposta a incidents durant la nit |
| Avaluació general | ⭐⭐⭐⭐⭐ | ⭐⭐ | — |
▲ 2026 Especificació de referència del robot de lliurament (Font: Hong Chiang Technology proves internes, dades de desplegament de clients en múltiples mercats i divulgacions públiques de competidors)
🔍 Seleccionant la Prioritat de Especificació Adequada per a la Teva Operació
El rendiment en hores punta és la vostra principal restricció: La densitat de la flota (distància de seguiment) i la velocitat de trànsit són la variable composta — la combinació de Hong Chiang produeix 20× el límit de rendiment dels sistemes llegats sobre infraestructura equivalent.
El vostre menú inclou líquids calents, caldos o servei de copes: El compliment del perfil de moviment en S és un llindar de especificació no negociable — no una preferència.L'exposició a responsabilitats dels sistemes competidors és quantificable i significativa.
Estàs avaluant el desplegament de múltiples unitats o l'expansió internacional: La predictibilitat de la cadena de subministrament (MIT), els diagnostics remots connectats al núvol i el motor de simulació pre-desplegament d'IA són les capacitats diferenciadores a gran escala.
VII. Model Financer: CapEx vs. OpEx — El Cas de Retorn d'Inversió de 8 a 12 Mesos
1. Reclassificant la Inversió: D'Expense Operativa a Actiu de Capital
L'error més comú en avaluar l'automatització de restaurants és classificar la compra d'equipament com una despesa operativa — la qual cosa fa que la comparació sigui un càlcul de cost contra cost que l'automatització rarament guanya de manera clara.El marc financer correcte és un conversió de CapEx a OpEx: estàs eliminant un flux de costos operatius permanents i inflacionistes (cursos de menjar) mitjançant el desplegament d'un actiu de capital depreciable amb un període de recuperació finit i modelat i un tractament fiscal favorable en la majoria de jurisdiccions.
els corredors d'aliments — salaris, impostos sobre la nòmina, primes d'assegurança de compensació laboral, contribucions a beneficis i costos de substitució per attrició — són una despesa d'operació (OpEx) sense límit i sense benefici d'amortització.Es composa amb cada cicle d'ajustament del salari mínim.El sistema de robots de lliurament de pistes de Hong Chiang és un Despeses de Capital (CapEx) : subjecte a horaris d'amortització accelerada, elegibilitat per a deducció de la Secció 179 en les declaracions fiscals dels EUA, i potencialment elegible per a finançament d'equips a taxes que milloren encara més el valor actual net.
La trajectòria de costos a cinc anys divergeix materialment. Suposant un augment conservador del 4% anual en els costos laborals — consistent amb les tendències salarials del sector de restaurants de l'Oficina d'Estadístiques Laborals dels EUA — el pressupost de mà d'obra per a la entrega humana per al mateix nombre de treballadors creix aproximadament un 22% al llarg de cinc anys. Un sistema de robots de lliurament de pistes totalment depreciat en el tercer any opera amb un cost marginal gairebé nul. La bretxa acumulativa és estructural, no cíclica.
| Dimensió Financera | Mà d'obra de lliurament humà | Robot de lliurament de pistes de Hong Chiang | Diferència neta |
|---|---|---|---|
| Classificació de costos | OpEx: permanent, no amortizable | CapEx — depreciable, elegible per la Secció 179 (EE. UU.) | Avantatge del tractament fiscal en l'Any 1 |
| Trajectòria de costos mensuals | Salari + impostos sobre nòmina + beneficis + cost d'attrició (escalant anualment) | Prop de zero post-depreciació | Eliminació de l'OpEx estructural |
| Consistència del servei | Variable — dependent del personal, assistència i rendiment | Determinista — 24/7, sense variació | Elimina el risc del sòl de qualitat del servei |
| Capacitat d'hora punta | Sostre dur al nombre de personal disponible | El rendiment de la flota és constant independentment de la variació de la demanda | Sostre de rendiment eliminat |
| Cost d'attrició | $2,300–$2,700 per empleat FOH que marxa (cost de substitució directe) | Zero — sense costos de rotació, reclutament o incorporació | Elimina els costos recurrents de formació en contractació |
| Línia de temps de recuperació de CapEx | N/A — responsabilitat contínua | 8–12 mesos (validat per l'operador) | Cada dia d'operació després del retorn és una contribució de marge pur |
▲ Comparació OpEx vs. CapEx: treball de lliurament humà vs. robot de lliurament de pista Hong Chiang — trajectòria financera de cinc anys
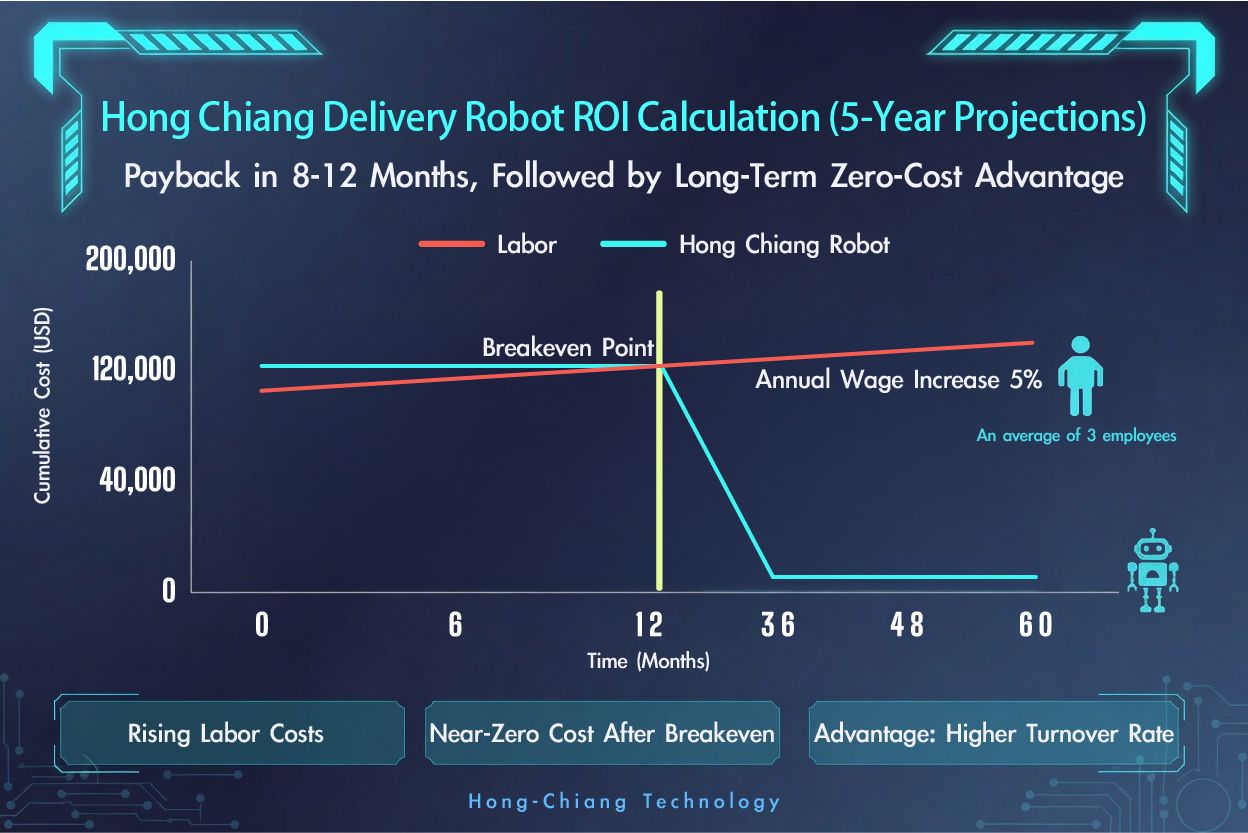
▲ Model de retorn de CapEx: trajectòria d'OpEx del treball humà vs. corba d'amortització del robot de lliurament de pista Hong Chiang — el punt de creuament defineix l'esdeveniment de retorn.
💰 Marc de càlcul del ROI: Conjunt de variables complet
Fórmula: Total CapEx ÷ Eliminació mensual d'OpEx = Període de recuperació (mesos)
Components d'OpEx a incloure en el denominador:
— Salari brut de lliurament laboral (tots FTE i a temps parcial)
— Contribució de l'impost sobre la nòmina de l'empleador (FICA, FUTA, SUTA — típicament 7–12% dels salaris bruts als EUA)
— Assignació de la prima de compensació dels treballadors
— Contribucions a beneficis (salut, acumulació de PTO)
— Cost de substitució d'attrició anualitzat (mitjana dels EUA: $2,300–$2,700 per empleat FOH que marxa ÷ 12)
— Cost d'oportunitat de ingressos per buits de servei durant les mancances de personal
Acceleradors addicionals d'ingressos (no inclòs en la fórmula base): utilització incremental de seients a partir de cobertes recuperades, reducció de la pèrdua d'aliments per eliminar la circulació passiva de cinturons, millora de la rotació de taules per un flux de lliurament més ràpid.
Contacteu amb un consultor de solucions de Hong Chiang per a un model financer específic de la instal·lació basat en la vostra estructura de costos laborals real i paràmetres del plànol de planta.
Un cas de desplegament documentat implica una cadena de yakiniku de múltiples unitats que va implementar el sistema de pistes E-type i I-type personalitzat de Hong Chiang en 38 seients.La instal·lació va eliminar els anteriors embussos d'hores punta que havien requerit corredors de menjar dedicats en cada torn de servei.Les dades del POS post-desplegament i el seguiment de la mà d'obra van mostrar un reducció del 60% en el temps de trànsit dels plats, un millora del 28% en la taxa de rotació de taules, i estalvis laborals anualitzats d'aproximadament NT$180,000 — aconseguint un període de recuperació de 8 mesos.La gestió d'operacions va notar que el personal de front-of-house es va reassignar amb èxit de la distribució d'aliments a rols de taula de major valor (gestió de graella, interacció amb els convidats i servei de condiments) durant la primera setmana, resultant en una millora mesurable en la retenció del personal a causa de les responsabilitats laborals millorades.
VIII. Preguntes Freqüents per a Operadors
IX. Avaluació: Quan esdevé l'automatització no opcional?
La crisi estructural de treball de la indústria de la restauració no és un fenomen cíclic que es corregeixi en la propera temporada de contractació. Les forces demogràfiques i reguladores que impulsen l'augment dels costos laborals a la primera línia són duradores: els salaris mínims es legislen a l'alça en horitzons de diversos anys, la participació de la força laboral en rols del sector serveis continua disminuint, i el cost per empleat de la rotació es complica amb cada nou cicle d'contractació. Els operadors que consideren l'automatització de la entrega com una inversió discrecional — alguna cosa a revisar "quan les condicions millorin" — estan mesurant la variable equivocada. La pregunta rellevant no és si automatitzar, sinó quin és el cost acumulat d'OpEx del retard, trimestre a trimestre.
Un sistema de robots de lliurament de pistes Hong Chiang no és una estratègia de substitució laboral.És un conversió d'OpEx a CapEx amb un horitzó de recuperació definit, un tractament fiscal favorable i un sostre de rendiment que no es degrada amb el temps.Cada dia d'operació després de l'esdeveniment de recuperació es realitza mitjançant un sistema que no requereix ajustaments salarials, contribucions a impostos sobre nòmines, exposició a compensacions laborals i pressupost de reclutament.L'avantatge financer acumulatiu d'aquesta posició, mantinguda durant tres a cinc anys contra una línia de base d'OpEx laboral en augment, no és marginal — és estructural.
Escollir Hong Chiang Technology significa seleccionar:
- La única velocitat de trànsit verificada públicament de 1,3 m/s de la indústria, combinada amb la sincronització de flotes de menys de 2 polzades (5 cm) — oferint 20 vegades la densitat de capacitat dels sistemes de cinta transportadora de sushi tradicionals sobre infraestructura equivalent
- Control de perfil de moviment en S patentat — eliminant la física de desplaçament de líquids que crea incidents de vessament, reducció de costos alimentaris i exposició a responsabilitats als EUA simultàniament
- Compliment de pista sense protrusió i tancament patentat que es plegat cap a dins — recuperant l'ús dels seients en lloc de rendir-lo a la geometria de l'equip
- Maquinari industrial de grau MIT, manteniment predictiu connectat al núvol, i un SLA de servei global que funciona a les 8 PM dissabte igual que a les 9 AM dimarts
Hong Chiang Technology es va fundar el 2004 per enginyers Donny Lo i Darran Lo, que van portar experiències en automatització industrial de precisió a un viatge de recerca de mercat al Japó. El que van observar en un restaurant de sushi kaiten — una reducció del 8 al 15% dels aliments per la circulació del cinturó caducat, temps d'espera dels clients que persistien durant el servei màxim amb tot el personal, una ineficiència espacial del 20% o més a causa de la infraestructura passiva del cinturó — no era una observació gastronòmica. Era una declaració de problema d'enginyeria.
L'empresa que van construir aplica control de moviment de grau industrial, algoritmes de sincronització de flotes i infraestructura de manteniment predictiu a una categoria que anteriorment no havia exigit aquests estàndards. Més de 3.000 ubicacions desplegades als EUA, Europa i Japó han validat el resultat. Els restaurants que han completat la transició de la infraestructura de cinta transportadora de sushi antiga a la plataforma de robots de lliurament de Hong Chiang no estan esperant la paritat competitiva — ja han anat més enllà.
🚀 Properes passes
Preparat per modelar el que una implementació de robot de lliurament per pista de Hong Chiang podria oferir per a la teva operació específica?
Els nostres consultors de solucions construeixen models financers específics per a les instal·lacions — basats en l'estructura real dels costos laborals, el plànol i el format del menú — sense cap càrrec.
→ Sol·licita una avaluació gratuïta del lloc i un model de ROI personalitzat → Veure les especificacions completes del producte
📚 Fonts de dades i referències
- Hong Chiang Technology Co., LTD. — Rastrejar les especificacions tècniques del robot de lliurament i les dades de rendiment certificades, 2026
- Hong Chiang Technology Co., LTD. — Informe de seguiment de desplegament de clients multi-mercat: Anàlisi de ROI, mercats dels EUA / Europeus / Japonesos, 2025–2026
- Oficina d'Estadístiques Laborals dels EUA — Cens Trimestral d'Ocupació i Salaris: Sector de Serveis Alimentaris i Locals d'Hostaleria, 2025 Enllaç
- Associació Nacional de Restaurants — Informe sobre l'Estat de la Indústria de Restaurants, 2026 Enllaç
- Investigació de la Indústria d'Automatització de Restaurants — Anàlisi del Mercat Global de Robots de Lliurament d'Aliments Montats sobre Ràils 2026 Enllaç
Lectura addicional: Intel·ligència d'automatització de restaurants

La Guia Completa per Obrir un Restaurant de Sushi amb Cinta Transportadora | ROI del Sushi Train
Anàlisi en profunditat de les operacions modernes de sushi kaiten — sistemes, referències de CapEx, configuracions híbrides de cinta més pista, i modelatge de ROI per a nous operadors i retrofits.

Crisi laboral dels restaurants dels EUA 2026: Com l'automatització de la entrega per pista tanca la bretxa estructural
Anàlisi basada en dades de la sequera laboral estructural del sector restaurant dels EUA — i un model documentat de com els sistemes de entrega automatitzada eliminen els costos d'OpEx a la sala mentre milloren el flux de servei.

Comparativa de robots de entrega de restaurants 2026: Guia de compra basada en especificacions
Una comparativa basada en especificacions dels principals robots de entrega de restaurants i sistemes de cinta transportadora automatitzats al mercat el 2026 — avaluats segons els requisits dels operadors dels EUA per al flux, l'exposició a responsabilitats i el ROI de capital.