
2026 सुशी ट्रेन (फूड डिलीवरी रोबोट) और सुशी कन्वेयर बेल्ट खरीदारों का गाइड
2026 वैश्विक रेस्तरां स्वचालन: क्यों ट्रैक डिलीवरी रोबोट भोजन के भविष्य हैं
2026 में, वैश्विक रेस्तरां उद्योग श्रम की कमी, उच्च किराए और स्वच्छता की मांगों के तिहरे दबाव का सामना कर रहा है - जिससे पारंपरिक सुशी कन्वेयर बेल्ट गति बनाए रखने में असमर्थ हैं। यह लेख Hong Chiang Technology के सुशी ट्रेन (खाद्य वितरण रोबोट) का गहन विश्लेषण प्रदान करता है: शीर्ष गति वितरण, S-curve स्पिल रोकथाम, अल्ट्रा-स्लिम बॉडी डिज़ाइन, गतिशील फॉलोइंग-डिस्टेंस एल्गोरिदम, और MIT गुणवत्ता आश्वासन सहित पांच मुख्य तकनीकी लाभ।
📌 कार्यकारी सारांश
वैश्विक आतिथ्य उद्योग अब अस्थायी स्टाफिंग बाधा को पार नहीं कर रहा है।2026 तक, यह संरचनात्मक श्रम संकट की स्थायी स्थिति में प्रवेश कर चुका है - जो आक्रामक न्यूनतम वेतन कानून, बढ़ते आवास लागत दबाव, और असंगत सेवा से बढ़ती देनदारी जोखिम के कारण और बढ़ गया है।ऐसी निष्क्रिय, बेल्ट-चालित अवसंरचना पर निर्भर रहना जैसे कि पुरानी sushi conveyor belt अब उन परिचालन चपलता को प्रदान नहीं करता है जो मार्जिन की रक्षा के लिए आवश्यक है।Hong Chiang Technology का ट्रैक डिलीवरी रोबोट सिस्टम इन दबावों का सीधे समाधान करता है: 1.3 मी/सेकंड की सत्यापित शीर्ष परिवहन गति, 2 इंच (5 सेमी) की दूरी पर स्वामित्व वाली बेड़े की समन्वय, पेटेंट S-curve Motion Profile स्पिल रोकथाम जो जलने की चोटों को समाप्त करता है, और ताइवान में इंजीनियर किया गया औद्योगिक-ग्रेड निर्माण — अमेरिका, यूरोप और जापान में 3,000 से अधिक रेस्तरां स्थानों में तैनात किया गया।ऑपरेटर लगातार 8–12 महीनों के भीतर वापसी की रिपोर्ट करते हैं, जिसमें काइटेन सुशी, हॉट पॉट, याकिनिकु, और किसी भी निश्चित मार्ग सेवा वातावरण का उपयोग शामिल है जो संरचनात्मक श्रम की कमी का सामना कर रहा है।
सामग्री की तालिका
- I. 2026 में विरासत सुशी कन्वेयर बेल्ट के खिलाफ संरचनात्मक मामला
- II. प्रदर्शन लाभ 1: सत्यापित परिवहन गति और बेड़े की घनत्व नियंत्रण
- III. प्रदर्शन लाभ 2: S-curve गति प्रोफ़ाइल - गति पर स्पिल देनदारियों को समाप्त करना
- IV. प्रदर्शन लाभ 3: शून्य-प्रोट्रूज़न ट्रैक अनुपालन - सीट उपयोग को अधिकतम करना
- V. प्रदर्शन लाभ 4: औद्योगिक-ग्रेड विश्वसनीयता और वैश्विक समर्थन अवसंरचना
- VI. 2026 विनिर्देशन बेंचमार्क: होंग चियांग बनाम विरासत प्रणाली
- VII. वित्तीय मॉडल: कैपएक्स बनाम ऑपएक्स - 8-12 महीने की वापसी का मामला
- VIII. ऑपरेटर FAQ
- IX. मूल्यांकन: स्वचालन कब अनिवार्य नहीं बनता?
I. 2026 में विरासत सुशी कन्वेयर बेल्ट के खिलाफ संरचनात्मक मामला
सुशी कन्वेयर बेल्ट - या कैइटेन सुशी सिस्टम - 1950 के दशक में जापान से उभरा था और 1990 के दशक में व्यावसायिक रूप से विकसित हुआ, यह एक वास्तविक संचालन नवाचार था। पैसिव बेल्ट सर्कुलेशन ने एक वास्तविक समस्या का समाधान किया: इसने व्यक्तिगत टेबलों पर व्यंजन पहुंचाने के लिए आवश्यक श्रम को कम कर दिया, जबकि एक आकर्षक दृश्य विपणन प्रभाव उत्पन्न किया। तीन दशकों तक, यह प्रारूप काम करता रहा।
2026 का संचालन वातावरण उन धारणाओं को अमान्य कर दिया है।सुशी कन्वेयर बेल्ट एक एकल-बिंदु-निष्क्रियता अवसंरचना है: एक केंद्रीय मोटर पूरे भोजन क्षेत्र में एक निरंतर बेल्ट को चलाती है।जब बेल्ट रुक जाती है — मोटर की विफलता, अवरोध, या यांत्रिक पहनने के कारण — तो पूरा वितरण प्रणाली एक साथ ऑफलाइन हो जाती है।कोई आंशिक पुनर्प्राप्ति नहीं है, कोई दोष पृथक्करण नहीं है, कोई समाधान नहीं है।एक शुक्रवार रात के खाने की सेवा के दौरान जब पूरी क्षमता होती है, तो वह विफलता कोई असुविधा नहीं है;यह एक पूर्ण राजस्व घटना है।
⚠️ विरासत सुशी कन्वेयर बेल्ट सिस्टम की तीन संरचनात्मक जिम्मेदारियाँ
① श्रेणीबद्ध एकल-बिंदु विफलता: एक मोटर या बेल्ट दोष पूरी सेवा लाइन को ऑफलाइन ले जाता है जिसमें कोई आंशिक पुनर्प्राप्ति विकल्प नहीं है — पीक-घंटे का जोखिम एकल यांत्रिक घटक में अस्वीकार्य रूप से केंद्रित होता है।
② गति-ज़िम्मेदारी व्यापार-बंद: बेल्ट की गति बढ़ाने से स्पिल घटनाएँ उत्पन्न होती हैं, जो सीधे खाद्य लागत पर प्रभाव डालती हैं और, अमेरिका और यूरोपीय संघ के बाजारों में, संभावित फिसलने और गिरने या तरल जलने की ज़िम्मेदारी का जोखिम उत्पन्न करती हैं।ऑपरेटरों को कुशल थ्रेशोल्ड से नीचे गति को सीमित करने के लिए मजबूर किया जाता है।
③ शून्य क्षमता लोचता: बेल्ट ट्रैक की लंबाई स्थापना पर निश्चित होती है।अचानक मात्रा में वृद्धि के दौरान थ्रूपुट बढ़ाने के लिए कोई तंत्र नहीं है, और सीटिंग लेआउट बेल्ट के भौतिक पथ द्वारा स्थायी रूप से सीमित है।
ये सीमाएँ 2026 में बिल्कुल गलत समय पर बढ़ रही हैं।अमेरिका के रेस्तरां संचालकों को एक संघीय न्यूनतम वेतन स्तर का सामना करना पड़ रहा है जो काफी बढ़ गया है, जबकि कैलिफोर्निया, न्यूयॉर्क और वाशिंगटन में राज्य स्तर के आदेशों ने फ्रंट-ऑफ-हाउस श्रम लागत को और भी अधिक बढ़ा दिया है।पूर्ण सेवा भोजन क्षेत्र में संरचनात्मक टर्नओवर वार्षिक रूप से 70-80% है - प्रत्येक departing फ्रंट-ऑफ-हाउस कर्मचारी के पास भर्ती, ऑनबोर्डिंग और उत्पादकता वृद्धि के पूर्ण लेखा-जोखा के समय अनुमानित $2,300 का प्रतिस्थापन लागत होता है।विरासत सुषी कन्वेयर बेल्ट सिस्टम चलाने वाले ऑपरेटर इस सभी ओपेक्स बोझ को बिना किसी मूल्यह्रास लाभ, बिना किसी पूंजीगत संपत्ति के रूप में कर उपचार, और बिना साल दर साल प्रदर्शन सीमा में सुधार के सहन करते हैं।

▲ वास्तुशिल्प परिवर्तन: Hong Chiang Technology ट्रैक डिलीवरी रोबोट (वितरित शक्ति) बनाम पारंपरिक सुशी कन्वेयर बेल्ट (केंद्रीकृत मोटर)। दोष सहिष्णुता में अंतर क्रमिक नहीं है - यह श्रेणीबद्ध है।
Hong Chiang Technology की इंजीनियरिंग प्रतिक्रिया एक संरचनात्मक है: बेल्ट से प्रत्येक व्यक्तिगत रोबोट में प्रेरक शक्ति को स्थानांतरित करना। ट्रैक एक नेविगेशन पथ बन जाता है, न कि शक्ति स्रोत। व्यक्तिगत इकाइयाँ स्वतंत्र रूप से विफल होती हैं और एक मिनट के भीतर प्रतिस्थापित की जाती हैं बिना बेड़े की सेवा को बाधित किए। जो एक उत्पाद उन्नयन की तरह दिखता है, वह वास्तव में एक वास्तु वर्गीकरण है - नाजुक, केंद्रीकृत बुनियादी ढांचे से एक लचीले, वितरित बेड़े में।
हॉन्ग चियांग का व्यावसायिक तैनाती मॉडल मूल रूप से गैर-व्यवधानकारी उन्नयन के चारों ओर बनाया गया था: ऑपरेटर मौजूदा ट्रैक बुनियादी ढांचे को बिना निर्माण के लिए बंद किए पुनः स्थापित कर सकते थे। जैसे-जैसे बेड़े का परिचालन ट्रैक रिकॉर्ड बाजारों में जमा होता गया, मॉडल परिपक्व होता गया। आज, हांग चियांग मल्टी-यूनिट चेन के लिए एक पूर्ण परिवर्तन भागीदार के रूप में कार्य करता है - पूरी तरह से सुशी कन्वेयर बेल्ट बुनियादी ढांचे को बदलते हुए और मौजूदा पीओएस, किचन डिस्प्ले और इन्वेंटरी प्रबंधन प्लेटफार्मों के साथ ट्रैक डिलीवरी रोबोट सिस्टम को एकीकृत करते हुए। कंपनी का स्वामित्व वाला एआई सिमुलेशन इंजन ऑपरेटरों को स्थापना शुरू होने से पहले डिलीवरी थ्रूपुट, सीटिंग कॉन्फ़िगरेशन और पीक-घंटे के कवरेज परिदृश्यों को मॉडल करने की अनुमति देता है - यह एक क्षमता है जो श्रेणी में किसी भी प्रतिस्पर्धी विक्रेता से उपलब्ध नहीं है।
II. प्रदर्शन लाभ 1: सत्यापित परिवहन गति और बेड़े की घनत्व नियंत्रण
1. 1.3 मीटर/सेकंड: श्रेणी में एकमात्र सार्वजनिक रूप से सत्यापित गति विनिर्देश
स्वचालित खाद्य सेवा प्रणालियों में परिवहन गति एक विपणन चर नहीं है - यह वितरण थ्रूपुट का प्राथमिक निर्धारक है, और थ्रूपुट सीधे तालिका टर्नओवर दक्षता को नियंत्रित करता है।Hong Chiang Technology के ट्रैक डिलीवरी रोबोट प्रमाणित अधिकतम गति पर 1.3 मीटर प्रति सेकंड (लगभग 4.3 फीट/सेकंड) पर कार्य करते हैं।यह रेस्तरां स्वचालन श्रेणी में एकमात्र सार्वजनिक रूप से प्रकट, स्वतंत्र रूप से सत्यापित गति विनिर्देश है।
इस गति को समझने के लिए: एक सामान्य मध्यम आकार के कैइटेन सुशी रेस्तरां में, जिसमें 20 मीटर की ट्रैक होती है, एक हांग चियांग रोबोट रसोई से सबसे दूर की मेज तक 13 सेकंड से कम समय में पहुंच सकता है।
तुलना करने पर, पारंपरिक सुशी कन्वेयर बेल्ट सिस्टम की अधिकतम गति केवल 0.1–0.5 मीटर/सेकंड होती है - एक ऐसी गति जो अक्सर उच्च मात्रा की सेवा और तेज़ टेबल टर्नओवर की मांगों को पूरा करने में संघर्ष करती है। यह प्रदर्शन अंतर महत्वपूर्ण है। 90 मिनट की पीक सेवा अवधि के दौरान, हांग चियांग की तेज़ ऑन-डिमांड डिलीवरी पारंपरिक कन्वेयर बेल्ट सिस्टम की तुलना में लगभग दोगुने कवर सर्व करने में सक्षम हो सकती है।
अधिकांश प्रतिस्पर्धी खाद्य वितरण रोबोट सिस्टम भी महत्वपूर्ण रूप से उच्च गति प्राप्त करने में असमर्थ रहे हैं, मुख्य रूप से क्योंकि वे उच्च गति पर फैलाव और तरल विस्थापन को रोकने की चुनौती को पार करने में असफल रहे हैं।
विरासत सुषी कन्वेयर बेल्ट मॉडल में एक द्वितीयक लागत आयाम है जिसे ऑपरेटर अक्सर कम आंकते हैं: खाद्य संकुचन।बेल्ट-सर्कुलेशन प्रारूप इस पर निर्भर करता है कि व्यंजन दृष्टिगत रूप से सुलभ और गुजरते हुए भोजन करने वालों के लिए आकर्षक बने रहें।खाद्य सुरक्षा प्रोटोकॉल — जिसमें हांग चियांग का Sushi Freshness System शामिल है — यह आवश्यक है कि एक बार निवास समय सीमा पार हो जाने पर व्यंजन को परिसंचरण से हटा दिया जाए।उच्च मात्रा के संचालन में, यह 8% से 15% की सत्यापित खाद्य लागत में कमी उत्पन्न करता है — एक प्रत्यक्ष COGS प्रभाव जिसे ऑन-डिमांड ट्रैक डिलीवरी पूरी तरह से समाप्त कर देती है, जो पुष्टि किए गए आदेशों के लिए व्यंजन भेजने के बजाय अटकलों के आधार पर प्रसारित करती है।
▲ हांग चियांग ट्रैक डिलीवरी रोबोट: 1.3 मीटर/सेकंड प्रमाणित ट्रांजिट गति - रेस्तरां स्वचालन श्रेणी में एकमात्र सार्वजनिक रूप से सत्यापित प्रदर्शन आंकड़ा।
2. सब-2-इंच बेड़ा समन्वय: प्रतिस्पर्धी प्रणालियों की तुलना में 20 गुना ट्रैक उपयोग।
शीर्ष गति केवल तभी थ्रूपुट उत्पन्न करती है जब बेड़े की घनत्व गति बनाए रखती है।हॉन्ग चियांग का स्वामित्व वाला डायनामिक फॉलोइंग-डिस्टेंस कंट्रोल एल्गोरिदम कई ट्रैक डिलीवरी रोबोटों को 5 सेमी (लगभग 2 इंच) के अंतरों पर समन्वित गठन बनाए रखने में सक्षम बनाता है — बिना संपर्क घटनाओं के।
प्रतिस्पर्धी प्रणालियाँ — जहाँ इंजीनियरिंग डेटा का खुलासा किया जाता है — आमतौर पर श्रृंखलाबद्ध टकराव को रोकने के लिए 100 सेमी या उससे अधिक की न्यूनतम दूरी की आवश्यकता होती है।इसके विपरीत, हांग चियांग का स्वामित्व डायनामिक फॉलोइंग-डिस्टेंस कंट्रोल एल्गोरिदम सुरक्षित, समन्वित संचालन को 2 इंच (5 सेमी) से कम के अंतराल पर सक्षम बनाता है।हमारे उन्नत एआई बेड़ा प्रबंधन प्रणाली के साथ मिलकर, यह ऑपरेटरों को समान ट्रैक अवसंरचना पर बिना भीड़ या टकराव के जोखिम के साथ काफी बड़े बेड़े (100+ इकाइयाँ) तैनात करने की अनुमति देता है - जो पारंपरिक प्रणालियों की तुलना में ट्रैक उपयोगिता और समग्र डिलीवरी थ्रूपुट में महत्वपूर्ण सुधार प्रदान करता है।
यह एल्गोरिदम हर इकाई की स्थिति और गति के निरंतर वास्तविक समय संवेदन के माध्यम से यह हासिल करता है, जिसमें गति बनाए रखने के लिए व्यक्तिगत त्वरण प्रोफाइल को गतिशील रूप से समायोजित किया जाता है। TOF (टाइम-ऑफ-फ्लाइट) बाधा पहचान एक द्वितीयक सुरक्षा परत प्रदान करती है: ट्रैक पर कोई भी विदेशी वस्तु प्रभावित इकाइयों में प्रगतिशील धीमी गति को सक्रिय करती है - यह एक कठोर रुकावट नहीं है - बेड़े की गति को बनाए रखते हुए टकराव की घटना को निष्क्रिय करती है।
📊 बेड़े की घनत्व: उपयोगिता गणित
प्रतिस्पर्धी सिस्टम (100+ सेमी फॉलोइंग दूरी): 20-मीटर ट्रैक → 10~11 यूनिट अधिकतम समवर्ती तैनाती
Hong Chiang Technology (2 इंच से कम फॉलोइंग दूरी): 20-मीटर ट्रैक → 55~65 यूनिट अधिकतम समवर्ती तैनाती
ट्रैक उपयोग दर हार्डवेयर ROI पर छिपा गुणक है।उच्च घनत्व का मतलब है कि एक ही पूंजी footprint से अधिक थ्रूपुट प्राप्त होता है - बिना एक भी अतिरिक्त रेल बिछाए।
III. प्रदर्शन लाभ 2: S-Curve गति प्रोफ़ाइल — गति पर स्पिल देनदारियों को समाप्त करना।
1. स्पिल क्यों एक कानूनी जोखिम है, केवल एक परिचालन परेशानी नहीं।
हर ऑपरेटर जिसने बड़े पैमाने पर स्वचालित डिलीवरी का मूल्यांकन किया है, उसी मोड़ पर पहुंचता है: प्रणाली तेजी से चलती है, लेकिन क्या यह गर्म तरल पदार्थों के साथ सुरक्षित रूप से चलती है?घरेलू अमेरिकी संचालन में, यह प्रश्न एक ऐसा आयाम रखता है जो खाद्य प्रस्तुति से परे जाता है।एक गिरा हुआ रामेन शोरबा का कटोरा — एक मेहमान पर, एक सर्वर पर, या एक साझा चलने की सतह पर — सेवा की गलती नहीं है।अमेरिका के टॉर्ट मानकों के तहत, यह एक संभावित व्यक्तिगत चोट देयता घटना है: गीली सतहों पर फिसलने और गिरने का जोखिम, जलने के दावों से जलने वाले मेहमानों, और सेवा क्षेत्र में कर्मचारियों के लिए OSHA जोखिम।
पारंपरिक खाद्य वितरण रोबोट — और सुशी कन्वेयर बेल्ट सिस्टम जिन्हें बदलने के लिए डिज़ाइन किया गया था — एक त्रिकोणीय वेग प्रोफ़ाइल का उपयोग करते हैं: अधिकतम त्वरण से संचालन गति तक, उसके बाद रुकने के लिए एक कठोर मंदी।यह गति प्रोफ़ाइल सूखे माल के लिए यांत्रिक रूप से कुशल है।खुले कंटेनरों में तरल पदार्थों पर लागू होने पर, यह त्वरण और ब्रेकिंग घटनाओं दोनों पर एक पूर्वानुमानित जड़त्व बल स्पाइक उत्पन्न करता है।भौतिकी अस्पष्ट नहीं है: तरल विस्थापन झटका (त्वरण के परिवर्तन की दर) के समानुपाती है, और त्रिकोणीय प्रोफाइल अधिकतम झटका तब उत्पन्न करती हैं जब एक मेहमान अपने ऑर्डर के लिए सबसे अधिक संभावना से पहुँच रहा होता है।

▲ S-curve गति प्रोफ़ाइल (होंग चियांग) बनाम ट्रैपेज़ॉइडल वेग वक्र (विरासत प्रणाली): त्वरण और ब्रेकिंग घटनाओं पर झटका समाप्त करना उन भौतिक स्थितियों को हटा देता है जो फैलने की घटनाएँ उत्पन्न करती हैं।
2. S-Curve गति प्रोफ़ाइल: खाद्य सेवा में औद्योगिक गति नियंत्रण लागू किया गया
होंग चियांग का समाधान एस-कर्व मोशन प्रोफाइल कंट्रोल का अनुप्रयोग है - सटीक औद्योगिक स्वचालन, सीएनसी मशीनिंग और हाई-स्पीड रेल में मानक वेग प्रबंधन प्रोटोकॉल - रेस्तरां डिलीवरी संदर्भ में।S-curve प्रोफ़ाइल त्वरण और मंदी के चरणों को कई प्रगतिशील खंडों में विभाजित करती है, जिससे पूरे समय में लगभग शून्य झटका के साथ एक चिकनी, निरंतर गति संक्रमण उत्पन्न होता है।
अनुभवात्मक उपमा सटीक है: एक अच्छी तरह से इंजीनियर किया गया शिंकानसेन या मैगलेव ट्रेन समान गति भिन्नताओं के माध्यम से तेजी लाती है बिना यात्रियों या उनके पेय पर कोई महसूस होने वाली जड़ता बल उत्पन्न किए। हांग चियांग रेस्तरां ट्रैक पैमाने पर समान गति नियंत्रण सिद्धांतों को लागू करता है। सत्यापित परिणाम: नियंत्रित परीक्षणों में और 3,000 से अधिक सक्रिय व्यावसायिक तैनाती में शून्य तरल विस्थापन घटनाओं के साथ 1.3 मीटर/सेकंड पर पूर्ण परिवहन चक्र।
हॉन्ग चियांग के तैनाती पोर्टफोलियो में सबसे मांग वाला प्रमाण बिंदु एक अमेरिकी बार स्थल है जहाँ प्रणाली लंबी-स्टेम वाले कॉकटेल प्रदान करती है - एक श्रेणी जहाँ यहां तक कि उप-मिलीमीटर कंपन संचालन के लिए अयोग्य है। हॉन्ग चियांग रेस्तरां स्वचालन श्रेणी में एकमात्र विक्रेता है जिसने उस वातावरण में एक सत्यापित, निरंतर तैनाती पूरी की है। परिणाम S-curve गति इंजीनियरिंग और संवेदनशीलता थ्रेशोल्ड के तहत हार्डवेयर की संरचनात्मक अखंडता को मान्य करता है।

▲ सत्यापित तैनाती: हांग चियांग ट्रैक डिलीवरी रोबोट्स जो एक अमेरिकी बार स्थल में लंबे स्टेमवेयर कॉकटेल ले जा रहे हैं - रेस्तरां स्वचालन श्रेणी में सबसे मांग वाली तरल सेवा प्रमाण बिंदु।
💡 देयता मात्राकरण: एक स्पिल वास्तव में एक अमेरिकी ऑपरेटर को कितना खर्च करता है
प्रत्यक्ष लागत: डिश फिर से बनाना (खाद्य लागत), ट्रैक की सफाई (श्रम समय), सफाई के दौरान सेवा में रुकावट।
अप्रत्यक्ष लागत: मेहमानों की असंतोष, दूसरे ऑर्डर के चक्र से पहले टेबल छोड़ना, निकटवर्ती व्यंजनों के बीच क्रॉस-संक्रमण से खाद्य सुरक्षा का जोखिम।
कानूनी जोखिम: फिसलने और गिरने की संपत्ति देयता दावे, तरल जलने के व्यक्तिगत चोट के दावे - दोनों श्रेणियों में औसत अमेरिकी निपटान आंकड़े $15,000–$75,000 के बीच होते हैं, कानूनी शुल्क से पहले।एकल घटना पूरे रोबोट बेड़े की वार्षिक संचालन लागत से अधिक हो सकती है।
S-curve मोशन प्रोफ़ाइल कोई आरामदायक विशेषता नहीं है।यह एक जोखिम प्रबंधन विनिर्देश है।
IV. प्रदर्शन लाभ 3: शून्य-प्रवृत्ति ट्रैक अनुपालन - सीट उपयोग को अधिकतम करना
आपके डाइनिंग फ्लोर प्लान के प्रत्येक वर्ग फुट को राजस्व उत्पन्न करना चाहिए। शहरी बाजारों — न्यूयॉर्क, लॉस एंजेलेस, शिकागो, लंदन, टोक्यो — में प्रति-स्क्वायर-फुट आवास लागत उन स्तरों तक पहुँच गई है जहाँ एक दिए गए फ्लोर प्लान में 28 और 32 कवर के बीच का अंतर एक व्यवहार्य और अव्यवहारिक इकाई अर्थशास्त्र मॉडल के बीच का अंतर है। एक स्वचालन समाधान जो ऑपरेटरों को सेवा गलियारों को चौड़ा करने, तालिकाओं को स्थानांतरित करने या भारी उपकरण चेसिस और बाहर की ओर झूलने वाले यांत्रिक घटकों को समायोजित करने के लिए मेहमानों की सीटिंग का बलिदान देने की आवश्यकता होती है, वह दक्षता में वृद्धि नहीं है। यह एक व्यापार है।
1. जीरो-प्रोट्रूज़न ट्रैक अनुपालन: प्रतिस्पर्धात्मक खाई के रूप में ज्यामिति
हॉन्ग चियांग की इंजीनियरिंग टीम ने विकास के दौरान एक गैर-परक्राम्य डिज़ाइन बाधा स्थापित की: रोबोट चेसिस को ट्रैक सीमा को किसी भी बिंदु पर पार नहीं करना चाहिए.यह प्रतिबंध रैखिक खंडों, वक्रों के माध्यम से, और — महत्वपूर्ण रूप से — कोने के संक्रमणों के माध्यम से लागू होता है जहाँ केन्द्रापसारक ज्यामिति अधिकांश चेसिस डिज़ाइन को बाहर लटकाने का कारण बनेगी।
फ्लोर प्लान डिज़ाइन के लिए व्यावहारिक प्रभाव महत्वपूर्ण है। पटरियों के परिधि और आस-पास की सीटिंग या फिक्स्चर के बीच आवश्यक सुरक्षा clearance को न्यूनतम किया जा सकता है। टेबल्स को ट्रैक के करीब रखा जा सकता है, जितना कि कोई प्रतिस्पर्धी प्रणाली अनुमति देती है, बिना चल रहे रोबोट और स्थिर मेहमानों, कांच के बर्तनों या फर्नीचर के बीच टकराव के जोखिम को पेश किए। एक संकुचित शहरी प्रारूप में - उच्च किराए के वातावरण में जहाँ स्वचालन का ROI सबसे महत्वपूर्ण है - यह ज्यामिति लाभ बिना भौतिक पदचिह्न को बदले प्रति स्थापना दो से चार कवर को पुनर्प्राप्त कर सकता है।

▲ शून्य-प्रोट्रूज़न ट्रैक अनुपालन: रोबोट चेसिस और ढक्कन तंत्र सभी ट्रांजिट स्थितियों - सीधी धाराओं, मोड़ों और कोनों के माध्यम से ट्रैक सीमा के भीतर रहते हैं। उपकरण ज्यामिति के लिए कोई क्लियरेंस बफर बलिदान नहीं किया गया।
2. पेटेंटेड इनवर्ड-फोल्डिंग एनक्लोजर: छिपे हुए टकराव वेक्टर को समाप्त करना
मानक खाद्य वितरण रोबोट बाहरी-घुमावदार या पॉप-अप ढक्कन तंत्र का उपयोग करते हैं जो खुलने पर वाहन के चेसिस से बाहर निकलते हैं। यह एक पूर्वानुमानित टकराव वेक्टर बनाता है: एक मेहमान जो अपने ऑर्डर के लिए पहुंच रहा है, एक सर्वर जो निकटवर्ती गलियारे में गुजर रहा है, एक पड़ोसी कांच या मसाले का बर्तन — इनमें से कोई भी वस्तु एक ढक्कन तंत्र द्वारा संपर्क में आ सकती है जिसे खुलने के चक्र के दौरान अपने वातावरण की कोई जानकारी नहीं होती।
हॉन्ग चियांग का पेटेंटेड इनवर्ड-फोल्डिंग एनक्लोजर इस वेक्टर को पूरी तरह से समाप्त कर देता है।ढक्कन की पूरी खुलने और बंद होने की यांत्रिक यात्रा हमेशा रोबोट के चेसिस की सीमा के भीतर रहती है - चाहे यूनिट ऑर्डर उठाने के लिए स्थिर हो या परिवहन गति से बेड़े के माध्यम से चल रही हो।रोबोट के अधिकतम बाहरी आयाम सभी संचालन स्थितियों में स्थिर और पूर्वानुमानित होते हैं।
यूएस ऑपरेटरों के लिए साइट-विशिष्ट इंस्टॉलेशन का मूल्यांकन करते समय एक द्वितीयक इंजीनियरिंग निहितार्थ है जिसे ध्यान में रखना चाहिए: प्रतिस्पर्धी बाहर-खुलने वाले ढक्कन प्रणाली को दीवार या स्थिर संरचना के खिलाफ ट्रैक-माउंटेड फ्लश नहीं किया जा सकता, क्योंकि ढक्कन के आर्क को खुली तरफ जगह की आवश्यकता होती है। यह प्रभावी रूप से किसी भी प्रतिस्पर्धी ट्रैक स्थापना के दोनों पक्षों पर न्यूनतम गलियारे की चौड़ाई की आवश्यकता को लागू करता है। हॉन्ग चियांग का अंदर की ओर मुड़ने वाला डिज़ाइन ऐसी कोई बाधा नहीं रखता - ट्रैक को दीवार, बूथ विभाजन, या संरचनात्मक कॉलम के खिलाफ किसी भी तरफ स्थापित किया जा सकता है बिना ढक्कन के कार्य को बलिदान किए या सेवा के खतरे को उत्पन्न किए।
🏠 सीट उपयोगिता गणित: पुनर्प्राप्त कवर का राजस्व मूल्य
एक अमेरिकी कैजुअल डाइनिंग औसत चेक $35–$55 प्रति कवर और एक टेबल टर्निंग 2.5× प्रति सेवा के साथ, गलियारे के अनुकूलन से पुनः प्राप्त प्रत्येक अतिरिक्त दो-टॉप (दो सीटें) लगभग $175–$275 की अतिरिक्त राजस्व प्रति सेवा अवधि उत्पन्न करता है।
250-दिन के संचालन वर्ष में, जिसमें दैनिक दो सेवा अवधि होती हैं, दो पुनः प्राप्त कवर $87,500–$137,500 की वार्षिक शीर्ष-रेखा राजस्व में योगदान करते हैं — बिना किसी अतिरिक्त वर्ग फुटेज के।
(आंकड़े उदाहरणात्मक हैं; वास्तविक परिणाम प्रारूप, चेक औसत और टर्नओवर दर पर निर्भर करते हैं।)
V. प्रदर्शन लाभ 4: औद्योगिक-ग्रेड विश्वसनीयता और वैश्विक समर्थन अवसंरचना
1. घटक विनिर्देश: औद्योगिक संचालन वातावरण में उपभोक्ता-ग्रेड विफलता
रेस्टोरेंट उपकरण किसी भी व्यावसायिक अनुप्रयोग के सबसे यांत्रिक और थर्मल रूप से प्रतिकूल वातावरणों में से एक में काम करता है: रसोई के भाप से लगातार उच्च-आर्द्रता का संपर्क, दैनिक सेवा अवधि के दौरान बार-बार थर्मल चक्र, यांत्रिक घटकों पर चिकनाई और कणों का संचय, और न्यूनतम रखरखाव अंतराल के साथ दो पीक-वॉल्यूम विंडो के बीच निरंतर संचालन।जो विफलता मोड हम प्रतिस्पर्धी खाद्य वितरण रोबोट तैनाती में सबसे अधिक बार देखते हैं, वे सीधे एकल मूल कारण की ओर इशारा करते हैं: उपभोक्ता-ग्रेड घटक विनिर्देश जो औद्योगिक-ग्रेड ड्यूटी चक्र पर लागू होता है.
लंबे समय तक लोड के तहत मोटर का अधिक गर्म होना, नमी के प्रवेश से नियंत्रण बोर्ड की विफलताएँ, और तापीय विस्तार से एन्कोडर का भटकाव - ये कोई यादृच्छिक विफलताएँ नहीं हैं। ये उन घटकों के पूर्वानुमानित परिणाम हैं जो अंतराल पर उपभोक्ता उपयोग के लिए रेटेड होते हैं, एक ऐसे वातावरण में जो निरंतर औद्योगिक प्रदर्शन की मांग करता है। हॉन्ग चियांग के ट्रैक डिलीवरी रोबोट को 24/7 व्यावसायिक ड्यूटी के लिए घटक स्तर से निर्दिष्ट किया गया है, जिसमें थर्मल प्रबंधन, प्रवेश सुरक्षा, और यांत्रिक सहिष्णुता रेस्तरां के संचालन के वातावरण के लिए कैलिब्रेट की गई है - उत्पाद परीक्षण प्रयोगशाला के लिए नहीं।

▲ औद्योगिक-ग्रेड घटक विनिर्देश: हांग चियांग ट्रैक डिलीवरी रोबोट निरंतर व्यावसायिक कार्य के लिए रेटेड हैं - अस्थायी उपभोक्ता चक्रों के लिए नहीं - उच्च आर्द्रता, उच्च तापमान वाले रेस्तरां के वातावरण में।
2. पूर्वानुमानित रखरखाव अवसंरचना: अनियोजित डाउनटाइम को समाप्त करना
हार्डवेयर विश्वसनीयता एक पूर्वापेक्षा है;पूर्वानुमानित विफलता से बचाव हांग चियांग द्वारा प्रदान किया जाने वाला संचालन मानक है।सिस्टम का वास्तविक समय घटक जीवनचक्र निगरानी तैनात बेड़े में प्रत्येक इकाई के लिए संचयी यात्रा दूरी, तापीय एक्सपोजर, और यांत्रिक चक्र गणना को ट्रैक करता है।जब कोई भी घटक उसके बीमा प्रतिस्थापन सीमा के करीब पहुँचता है, तो प्रणाली एक सक्रिय रखरखाव चेतावनी उत्पन्न करती है - एक विफलता घटना होने से पहले।
सॉफ़्टवेयर-परत विसंगतियों के लिए, होंग चियांग का क्लाउड-से जुड़े दूरस्थ निदान प्लेटफ़ॉर्म ताइवान स्थित इंजीनियरिंग टीम को विसंगति पहचानने, निदान करने और तैनात इकाइयों के लिए समाधान प्रोटोकॉल को मिनटों के भीतर भेजने में सक्षम बनाता है - बिना किसी ऑन-साइट तकनीशियन की यात्रा की आवश्यकता के। अमेरिका और यूरोपीय ऑपरेटरों के लिए, इसका मतलब है कि अधिकांश घटनाओं के लिए प्रभावी समर्थन प्रतिक्रिया समय मिनटों में मापा जाता है, व्यापारिक दिनों में नहीं। जब साइट पर हार्डवेयर हस्तक्षेप की आवश्यकता होती है, तो हांग चियांग के क्षेत्रीय सेवा भागीदार नेटवर्क ने प्रमुख बाजारों में बीमा मांग डेटा के अनुसार पूर्व-स्थित भागों का इन्वेंटरी बनाए रखा है - अनुमान के आधार पर नहीं - उत्तरी अमेरिका, यूरोप और एशिया-प्रशांत में।
ग्राहक-सामना करने वाली घटना रिपोर्टिंग ऑपरेटर नियंत्रण पैनल में एकीकृत है: एकल-क्रिया अलर्ट क्षेत्रीय सेवा टीम को तत्काल कार्य भेजता है, साथ ही मोबाइल सूचना भी भेजता है - रिपोर्टिंग के क्षण से एक प्रलेखित SLA घड़ी स्थापित करता है।
3. MIT सप्लाई चेन: "ताइवान में इंजीनियर" का वैश्विक ऑपरेटरों के लिए क्या अर्थ है
रेस्टोरेंट उपकरण श्रेणी में, उत्पत्ति का देश आपूर्ति श्रृंखला की भविष्यवाणी और समर्थन बुनियादी ढांचे की गहराई का एक प्रॉक्सी है। "ताइवान में इंजीनियर किया गया" हांग चियांग के मामले में दर्शाता है: एक पूरी तरह से एकीकृत घरेलू निर्माण और घटक आपूर्ति श्रृंखला जिसमें दस्तावेजित लीड समय, सभी प्रमुख बाजारों के लिए अंग्रेजी में बनाए रखा गया पूर्ण तकनीकी दस्तावेज, और एक फैक्ट्री इंजीनियरिंग टीम जो अनुकूलन अनुरोधों का जवाब दे सकती है - गैर-मानक ट्रैक कॉन्फ़िगरेशन, ब्रांड-विशिष्ट बाहरी फिनिश, पीओएस एकीकरण विनिर्देश - बिना किसी वितरक मध्यस्थ के माध्यम से रूट किए।
बहु-यूनिट श्रृंखला ऑपरेटरों और फ्रैंचाइज़ सिस्टम के लिए जो भौगोलिक क्षेत्रों में उपकरण मानकीकरण का मूल्यांकन कर रहे हैं, आपूर्ति श्रृंखला की भविष्यवाणी एक प्राथमिक चयन मानदंड है। एक विक्रेता जिसकी घटक स्रोतिंग अस्पष्ट है, जिसकी तकनीकी दस्तावेज़ केवल एक ही भाषा में मौजूद है, या जिसकी अनुकूलन लीड समय महीनों में मापा जाता है, सप्ताहों में नहीं, वह खरीद जोखिम को बढ़ाता है जो पैमाने पर बढ़ता है। हांग चियांग की एमआईटी आपूर्ति श्रृंखला को वैश्विक लॉजिस्टिक्स व्यवधानों के खिलाफ तनाव परीक्षण किया गया है जो प्रतिस्पर्धी विक्रेताओं को प्रभावित करते हैं - और पूरे समय दस्तावेज़ित वितरण प्रदर्शन बनाए रखा है।
VI. 2026 विनिर्देशन बेंचमार्क: होंग चियांग बनाम विरासत प्रणाली
निम्नलिखित बेंचमार्क तालिका सत्यापित विनिर्देशों को दर्शाती है जहाँ प्रतिस्पर्धी डेटा सार्वजनिक रूप से उपलब्ध है, और जहाँ यह नहीं है वहाँ प्रलेखित ऑपरेटर फीडबैक। प्रत्येक मैट्रिक एक परिचालन परिणाम से मेल खाता है - न कि उत्पाद कैटलॉग के दावे से।

▲ होंग चियांग ट्रैक डिलीवरी रोबोट (C-सीरीज, ओपन-टॉप कॉन्फ़िगरेशन) बनाम सामान्य प्रतिस्पर्धी इकाई - चेसिस प्रोफ़ाइल, आयामी अनुपालन, और ज़ीरो-प्रोट्रूज़न ट्रैक अनुपालन की तुलना।
| विनिर्देशन | Hong Chiang Technology (MIT) सिफारिश की गई | विरासत / प्रतिस्पर्धी प्रणाली | परिचालन प्रभाव |
|---|---|---|---|
| प्रमाणित शीर्ष गति | 1.3 मी/सेकंड (4.3 फीट/सेकंड) - सार्वजनिक रूप से सत्यापित | 0.6 मी/सेकंड या उससे कम - अधिकांश विक्रेता खुलासा नहीं करते | प्रति सेवा घंटे 2× थ्रूपुट क्षमता |
| फ्लीट फॉलोइंग दूरी | <5 सेमी / ~2 इंच (गतिशील समन्वय) | 100+ सेमी (कठोर सुरक्षा बफर) | समान ट्रैक पर 20× फ्लीट घनत्व — प्रत्यक्ष थ्रूपुट गुणक |
| गति प्रोफ़ाइल / फैलाव नियंत्रण | S-curve (शून्य तरल विस्थापन — सत्यापित) | ट्रेपेज़ॉइडल (उच्च फैलाव-घटना आवृत्ति) | तरल जलने की देनदारी जोखिम और खाद्य पुनःनिर्माण लागत को समाप्त करता है |
| चेसिस सीमा अनुपालन | शून्य-प्रोट्रूज़न ट्रैक अनुपालन - सभी शर्तें | कोनों पर ओवरहैंग सामान्य; कोई औपचारिक अनुपालन मानक नहीं | सीट उपयोग को अधिकतम करता है; कोई गलियारे की चौड़ाई बढ़ाने की आवश्यकता नहीं |
| ढक्कन तंत्र | पेटेंटेड इनवर्ड-फोल्डिंग एनक्लोजर (चेसिस के भीतर रहता है) | बाहर की ओर घूमने वाला - खुली तरफ क्लियरेंस बफर की आवश्यकता होती है | अतिथि/स्टाफ टकराव वेक्टर को समाप्त करता है; दीवार-फ्लश ट्रैक स्थापना की अनुमति देता है |
| मल्टी-डिस्पैच समर्थन | एआई पथ अनुकूलन - पूरी तरह से समर्थित | अधिकांश सिस्टम एकल रसोई डिस्पैच बिंदु तक सीमित | जटिल मल्टी-किचन और मल्टी-ज़ोन फ़्लोर प्लान कॉन्फ़िगरेशन का समर्थन करता है। |
| अवरोध प्रतिक्रिया | TOF-प्रेरित प्रगतिशील धीमा करना | कठोर रुकावट या टकराव - कोई क्रमिक प्रतिक्रिया नहीं | फ्लीट की गति संरक्षित; टकराव श्रृंखला के जोखिम को समाप्त करता है |
| यूनिट विफलता का प्रभाव | 60 सेकंड से कम यूनिट स्वैप; फ्लीट बिना रुकावट के जारी रहता है | केंद्रीय प्रणाली की विफलता पूरी लाइन को ऑफ़लाइन ले जाती है | दोष सहिष्णुता श्रेणीबद्ध है - क्रमिक नहीं |
| दूरस्थ समर्थन | क्लाउड-से जुड़े वास्तविक समय निदान; वैश्विक SLA | क्षेत्रीय वितरक पर निर्भर; परिवर्तनशील प्रतिक्रिया समय | बहु-यूनिट श्रृंखला मानकीकरण और रातोंरात घटना प्रतिक्रिया के लिए महत्वपूर्ण |
| कुल मूल्यांकन | ⭐⭐⭐⭐⭐ | ⭐⭐ | — |
▲ 2026 ट्रैक डिलीवरी रोबोट विनिर्देश बेंचमार्क (स्रोत: Hong Chiang Technology आंतरिक परीक्षण, बहु-बाजार ग्राहक तैनाती डेटा, और सार्वजनिक रूप से उपलब्ध प्रतियोगी खुलासे)
🔍 आपके संचालन के लिए सही विशिष्टता प्राथमिकता का चयन करना
पीक-घंटे की थ्रूपुट आपकी प्राथमिक बाधा है: बेड़े की घनत्व (अनुसरण दूरी) और परिवहन गति संयोजित चर हैं — हांग चियांग का संयोजन समान बुनियादी ढांचे पर विरासत प्रणालियों के थ्रूपुट छत का 20 गुना उत्पादन करता है.
आपका मेनू गर्म तरल पदार्थ, शोरबा, या स्टेमवेयर सेवा शामिल करता है: S-curve मोशन प्रोफाइल अनुपालन एक गैर-परक्राम्य विनिर्देशन सीमा है — यह एक प्राथमिकता नहीं है।प्रतिस्पर्धी प्रणालियों से देयता जोखिम मापने योग्य और महत्वपूर्ण है।
आप बहु-यूनिट तैनाती या अंतरराष्ट्रीय विस्तार का मूल्यांकन कर रहे हैं: आपूर्ति श्रृंखला की भविष्यवाणी (MIT), क्लाउड-से जुड़े दूरस्थ निदान, और AI पूर्व-तैनाती सिमुलेशन इंजन बड़े पैमाने पर भिन्नता लाने वाली क्षमताएँ हैं।
VII. वित्तीय मॉडल: कैपेक्स बनाम ऑपेक्स — 8–12 महीने की वापसी का मामला
1. निवेश का पुनर्वर्गीकरण: परिचालन व्यय से पूंजीगत संपत्ति में
रेस्टोरेंट ऑटोमेशन का मूल्यांकन करते समय सबसे सामान्य गलती उपकरण खरीद को संचालन व्यय के रूप में वर्गीकृत करना है - जो तुलना को लागत बनाम लागत की गणना बनाता है जिसमें ऑटोमेशन शायद ही कभी साफ-सुथरे तरीके से जीतता है।सही वित्तीय ढांचा एक कैपएक्स-से-ऑपएक्स रूपांतरण है: आप एक स्थायी, बढ़ती संचालन लागत धारा (फूड रनर्स) को समाप्त कर रहे हैं, एक अमूर्त पूंजी संपत्ति को तैनात करके, जिसमें एक सीमित, मॉडल किया गया पुनर्भुगतान अवधि और अधिकांश न्यायालयों में अनुकूल कर उपचार है।
फूड रनर्स — वेतन, पेरोल कर, श्रमिकों के मुआवजे के प्रीमियम, लाभ योगदान, और कमी की भरपाई की लागत — एक ऑपरेटिंग खर्च (OpEx) है जिसमें कोई सीमा नहीं है और न ही मूल्यह्रास का लाभ है।यह हर न्यूनतम वेतन समायोजन चक्र के साथ बढ़ता है।हॉन्ग चियांग का ट्रैक डिलीवरी रोबोट सिस्टम एक पूंजी व्यय (कैपएक्स) है: जो त्वरित मूल्यह्रास कार्यक्रमों, अमेरिका के कर फाइलिंग में धारा 179 कटौती की पात्रता के अधीन है, और संभावित रूप से ऐसे उपकरण वित्तपोषण के लिए पात्र है जो शुद्ध वर्तमान मूल्य को और बेहतर बनाते हैं।
पांच साल की लागत की प्रवृत्ति महत्वपूर्ण रूप से भिन्न होती है। यदि हम एक संवेदनशील 4% वार्षिक श्रम लागत वृद्धि मानते हैं - जो कि अमेरिका के श्रम सांख्यिकी ब्यूरो के रेस्तरां क्षेत्र के वेतन प्रवृत्तियों के अनुरूप है - तो समान संख्या में मानव डिलीवरी श्रम बजट पांच वर्षों में लगभग 22% बढ़ता है। तीसरे वर्ष में पूरी तरह से मूल्यह्रासित ट्रैक डिलीवरी रोबोट प्रणाली लगभग-शून्य सीमांत लागत पर काम करती है। यह बढ़ता हुआ अंतर संरचनात्मक है, चक्रीय नहीं।
| वित्तीय आयाम | मानव वितरण श्रम | हॉन्ग चियांग ट्रैक डिलीवरी रोबोट | नेट अंतर |
|---|---|---|---|
| लागत वर्गीकरण | ओपेक्स - स्थायी, गैर-ह्रासनीय | कैपेक्स - ह्रासनीय, अनुभाग 179 के लिए योग्य (यूएस) | वर्ष 1 में कर उपचार लाभ |
| मासिक लागत की प्रवृत्ति | वेतन + पेरोल कर + लाभ + कमी लागत (वार्षिक वृद्धि) | लगभग शून्य पोस्ट-ह्रास | संरचनात्मक ओपेक्स समाप्ति |
| सेवा स्थिरता | परिवर्तनीय - स्टाफिंग, उपस्थिति और प्रदर्शन पर निर्भर | निर्धारित - 24/7, कोई भिन्नता नहीं | सेवा गुणवत्ता के न्यूनतम जोखिम को समाप्त करता है |
| पीक-घंटे की क्षमता | उपलब्ध कर्मचारियों पर कठोर सीमा | फ्लीट थ्रूपुट मांग की भिन्नता के बावजूद स्थिर है | थ्रूपुट सीमा हटा दी गई |
| छोड़ने की लागत | प्रत्येक departing FOH कर्मचारी के लिए $2,300–$2,700 (प्रत्यक्ष प्रतिस्थापन लागत) | शून्य — कोई टर्नओवर, भर्ती, या ऑनबोर्डिंग लागत नहीं | दोहराने वाली भर्ती प्रशिक्षण लागत को समाप्त करता है |
| कैपएक्स वसूली समयरेखा | एन/ए — चल रही देनदारी | 8–12 महीने (ऑपरेटर द्वारा मान्य) | भुगतान के बाद हर संचालन दिवस शुद्ध मार्जिन योगदान है |
▲ ऑपेक्स बनाम कैपएक्स तुलना: मानव डिलीवरी श्रम बनाम होंग चियांग ट्रैक डिलीवरी रोबोट — पांच साल की वित्तीय प्रक्षिप्ति
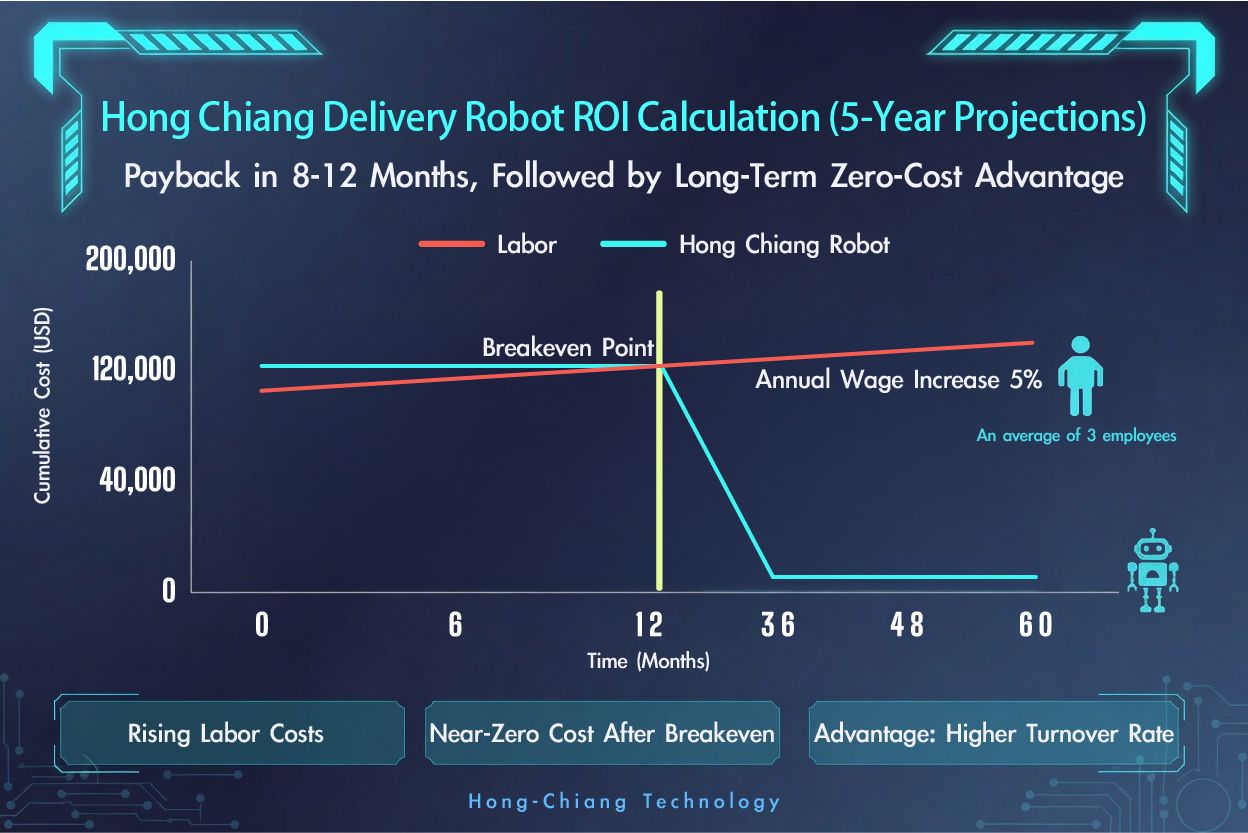
▲ कैपएक्स वसूली मॉडल: मानव श्रम ऑपेक्स प्रक्षिप्ति बनाम होंग चियांग ट्रैक डिलीवरी रोबोट मूल्यह्रास वक्र — क्रॉसओवर बिंदु वसूली घटना को परिभाषित करता है।
💰 ROI गणना ढांचा: पूर्ण चर सेट
सूत्र: कुल कैपेक्स ÷ मासिक ओपेक्स उन्मूलन = पुनर्भुगतान अवधि (महीने)
ओपेक्स घटक जो हरफनमौला में शामिल करने हैं:
— कुल डिलीवरी श्रम वेतन (सभी FTE और अंशकालिक)
— नियोक्ता पेरोल कर योगदान (FICA, FUTA, SUTA — आमतौर पर अमेरिका में कुल वेतन का 7–12%)
— श्रमिकों के मुआवजे का प्रीमियम आवंटन
— लाभ योगदान (स्वास्थ्य, PTO संचय)
— वार्षिकीकृत छंटनी प्रतिस्थापन लागत (अमेरिका का औसत: $2,300–$2,700 प्रति departing FOH कर्मचारी ÷ 12)
— स्टाफिंग की कमी के दौरान सेवा अंतराल से राजस्व अवसर लागत
अतिरिक्त राजस्व त्वरक (बुनियादी सूत्र में शामिल नहीं): पुनर्प्राप्त कवर से सीट उपयोग में वृद्धि, निष्क्रिय बेल्ट परिसंचरण को समाप्त करने से खाद्य संकुचन में कमी, तेज डिलीवरी थ्रूपुट से टेबल टर्नओवर में सुधार.
एक सुविधा-विशिष्ट वित्तीय मॉडल के लिए हांग चियांग समाधान सलाहकार से संपर्क करें जो आपकी वास्तविक श्रम लागत संरचना और मंजिल योजना पैरामीटर पर आधारित है।
एक प्रलेखित तैनाती मामले में एक बहु-इकाई याकिनीकु श्रृंखला शामिल है जिसने 38 सीटों में हांग चियांग की अनुकूलित E-प्रकार और I-प्रकार ट्रैक प्रणाली को लागू किया।स्थापना ने पिछले पीक-घंटे की बाधाओं को समाप्त कर दिया जो हर सेवा शिफ्ट पर समर्पित खाद्य धावकों की आवश्यकता थी।परिनियोजन के बाद POS डेटा और श्रम ट्रैकिंग ने 60% की कमी डिश ट्रांजिट समय में, 28% की सुधार टेबल टर्नओवर दर में, और लगभग NT$180,000 की वार्षिक श्रम बचत दिखाई — 8 महीने की वापसी अवधि हासिल की।ऑपरेशंस प्रबंधन ने नोट किया कि पहले सप्ताह के भीतर फ्रंट-ऑफ-हाउस स्टाफ को खाद्य सेवा से उच्च-मूल्य वाले टेबलसाइड भूमिकाओं (ग्रिल प्रबंधन, मेहमानों के साथ बातचीत, और मसाले सेवा) में सफलतापूर्वक पुनः आवंटित किया गया, जिसके परिणामस्वरूप बढ़ी हुई नौकरी की जिम्मेदारियों के कारण स्टाफ की स्थिरता में मापने योग्य सुधार हुआ।
VIII. ऑपरेटर FAQ
IX. मूल्यांकन: स्वचालन कब अनिवार्य नहीं होता?
रेस्टोरेंट उद्योग की संरचनात्मक श्रम संकट एक चक्रीय घटना नहीं है जो अगले भर्ती सत्र में ठीक हो जाती है। फ्रंट-ऑफ-हाउस श्रम लागत वृद्धि को प्रभावित करने वाले जनसांख्यिकीय और नियामक बल स्थायी हैं: न्यूनतम वेतन स्तर कई वर्षों के कार्यक्रमों पर ऊपर की ओर कानून बनाये जाते हैं, सेवा क्षेत्र की भूमिकाओं में कार्यबल की भागीदारी लगातार घट रही है, और प्रत्येक नए भर्ती चक्र के साथ कर्मचारियों की लागत में वृद्धि होती है। जो ऑपरेटर डिलीवरी ऑटोमेशन को एक विवेकाधीन निवेश के रूप में देखते हैं - कुछ ऐसा जिसे "जब परिस्थितियाँ बेहतर हों" तब फिर से देखा जाए - वे गलत चर को माप रहे हैं। संबंधित प्रश्न यह नहीं है कि स्वचालन करना है या नहीं, बल्कि यह है कि स्थगन की संचयी ऑपेक्स लागत, तिमाही दर तिमाही, क्या है।
हॉन्ग चियांग ट्रैक डिलीवरी रोबोट सिस्टम श्रम प्रतिस्थापन रणनीति नहीं है।यह एक OpEx से CapEx रूपांतरण है जिसमें एक निर्धारित पुनर्भुगतान क्षितिज, अनुकूल कर उपचार, और एक प्रदर्शन सीमा है जो समय के साथ खराब नहीं होती।भुगतान की घटना के बाद हर दिन का संचालन एक ऐसे सिस्टम द्वारा किया जाता है जिसे वेतन समायोजन, पेरोल कर योगदान, श्रमिकों के मुआवजे का जोखिम, और भर्ती बजट की आवश्यकता नहीं होती है।उस स्थिति का संचित वित्तीय लाभ, जो तीन से पांच वर्षों तक बढ़ते श्रम ऑपेक्स आधार के खिलाफ रखा गया है, तुच्छ नहीं है - यह संरचनात्मक है।
Hong Chiang Technology का चयन करना का अर्थ है:
- उद्योग की एकमात्र सार्वजनिक रूप से सत्यापित 1.3 मीटर/सेकंड ट्रांजिट गति, 2 इंच (5 सेमी) से कम की बेड़े की समन्वय के साथ - समान बुनियादी ढांचे पर पारंपरिक सुशी कन्वेयर बेल्ट सिस्टम की 20 गुना थ्रूपुट घनत्व प्रदान करना
- पेटेंटेड S-curve मोशन प्रोफाइल नियंत्रण - तरल विस्थापन भौतिकी को समाप्त करना जो स्पिल घटनाओं, खाद्य लागत में कमी, और अमेरिका में देनदारी के जोखिम को एक साथ उत्पन्न करता है
- जीरो-प्रोट्रूज़न ट्रैक अनुपालन और पेटेंटेड इनवर्ड-फोल्डिंग एनक्लोजर - सीट उपयोगिता को पुनः प्राप्त करना बजाय इसे उपकरण की ज्यामिति को सौंपने के
- MIT औद्योगिक-ग्रेड हार्डवेयर, क्लाउड-से जुड़े पूर्वानुमानित रखरखाव, और एक वैश्विक सेवा SLA जो शनिवार को रात 8 बजे उसी तरह प्रदर्शन करता है जैसे मंगलवार को सुबह 9 बजे
Hong Chiang Technology की स्थापना 2004 में इंजीनियर डॉनी लो और डैरेन लो द्वारा की गई थी, जिन्होंने जापान के लिए एक बाजार अनुसंधान यात्रा में सटीक औद्योगिक स्वचालन पृष्ठभूमि लाई। जिन चीज़ों का उन्होंने एक कैइटेन सुशी रेस्तरां में अवलोकन किया - समय पर बेल्ट सर्कुलेशन से 8-15% भोजन की कमी, पूरी तरह से स्टाफ किए गए पीक सेवा के दौरान मेहमानों का इंतजार, निष्क्रिय बेल्ट बुनियादी ढांचे से 20%+ स्थानिक अक्षमता - यह एक भोजन अवलोकन नहीं था। यह एक इंजीनियरिंग समस्या का विवरण था।
जिस कंपनी का उन्होंने निर्माण किया है, वह औद्योगिक-ग्रेड गति नियंत्रण, बेड़े की समन्वय एल्गोरिदम, और पूर्वानुमानित रखरखाव अवसंरचना को एक श्रेणी पर लागू करती है जिसने पहले इन मानकों की मांग नहीं की थी। अमेरिका, यूरोप, और जापान में 3,000 से अधिक तैनात स्थानों ने परिणाम को मान्यता दी है। रेस्तरां जो विरासत सुषी कन्वेयर बेल्ट अवसंरचना से हांग चियांग के ट्रैक डिलीवरी रोबोट प्लेटफॉर्म में संक्रमण पूरा कर चुके हैं, वे प्रतिस्पर्धात्मक समानता की प्रतीक्षा नहीं कर रहे हैं - वे पहले ही इससे आगे बढ़ चुके हैं।
🚀 अगले कदम
क्या आप यह मॉडल बनाने के लिए तैयार हैं कि एक हांग चियांग ट्रैक डिलीवरी रोबोट तैनाती आपके विशेष संचालन के लिए क्या प्रदान करेगी?
हमारे समाधान सलाहकार सुविधा-विशिष्ट वित्तीय मॉडल बनाते हैं - आपके वास्तविक श्रम लागत संरचना, मंजिल योजना, और मेनू प्रारूप के आधार पर - बिना किसी शुल्क के।
→ एक मुफ्त साइट मूल्यांकन और कस्टम ROI मॉडल का अनुरोध करें → पूर्ण उत्पाद विनिर्देश देखें
📚 डेटा स्रोत और संदर्भ
- Hong Chiang Technology Co., LTD. — डिलीवरी रोबोट तकनीकी विनिर्देश और प्रमाणित प्रदर्शन डेटा, 2026 को ट्रैक करें।
- Hong Chiang Technology Co., LTD. — मल्टी-मार्केट क्लाइंट डिप्लॉयमेंट ट्रैकिंग रिपोर्ट: ROI विश्लेषण, अमेरिका / यूरोपीय / जापानी बाजार, 2025–2026
- यूएस ब्यूरो ऑफ लेबर स्टैटिस्टिक्स — रोजगार और वेतन की त्रैमासिक जनगणना: खाद्य सेवाएँ और पेय स्थान क्षेत्र, 2025 लिंक
- राष्ट्रीय रेस्तरां संघ — रेस्तरां उद्योग रिपोर्ट, 2026 लिंक
- रेस्टोरेंट ऑटोमेशन उद्योग अनुसंधान — 2026 वैश्विक ट्रैक-माउंटेड फूड डिलीवरी रोबोट मार्केट विश्लेषण लिंक
अधिक पढ़ाई: रेस्तरां स्वचालन बुद्धिमत्ता

कन्वेयर बेल्ट सुशी रेस्तरां खोलने के लिए पूर्ण मार्गदर्शिका | सुशी ट्रेन ROI
आधुनिक कैइटेन सुशी संचालन का पूर्ण-गहराई विश्लेषण - सिस्टम, कैपएक्स बेंचमार्क, हाइब्रिड बेल्ट-प्लस-ट्रैक कॉन्फ़िगरेशन, और नए और रेट्रोफिटिंग ऑपरेटरों के लिए आरओआई मॉडलिंग।

यू.एस. रेस्तरां श्रम संकट 2026: ट्रैक डिलीवरी स्वचालन कैसे संरचनात्मक अंतर को बंद करता है
यूएस रेस्तरां क्षेत्र के संरचनात्मक श्रम सूखे का डेटा-समर्थित विश्लेषण - और एक प्रलेखित मॉडल कि कैसे स्वचालित डिलीवरी सिस्टम फ्रंट-ऑफ-हाउस ओपेक्स को समाप्त करते हैं जबकि सेवा थ्रूपुट में सुधार करते हैं।

2026 रेस्तरां डिलीवरी रोबोट तुलना: विनिर्देशन-आधारित खरीदार गाइड
2026 में बाजार में प्रमुख रेस्तरां डिलीवरी रोबोट और स्वचालित कन्वेयर बेल्ट सिस्टम की विनिर्देशन-आधारित तुलना - थ्रूपुट, देयता जोखिम, और पूंजी आरओआई के लिए यूएस ऑपरेटर आवश्यकताओं के खिलाफ मूल्यांकन किया गया।